
Quick Links






 |
Type | Hybrid Stepper Motor | Excitation Sequence | |||||||||||||||||||
| Flange Size | 60mm Square | |||||||||||||||||||||
| Phases | 2 | |||||||||||||||||||||
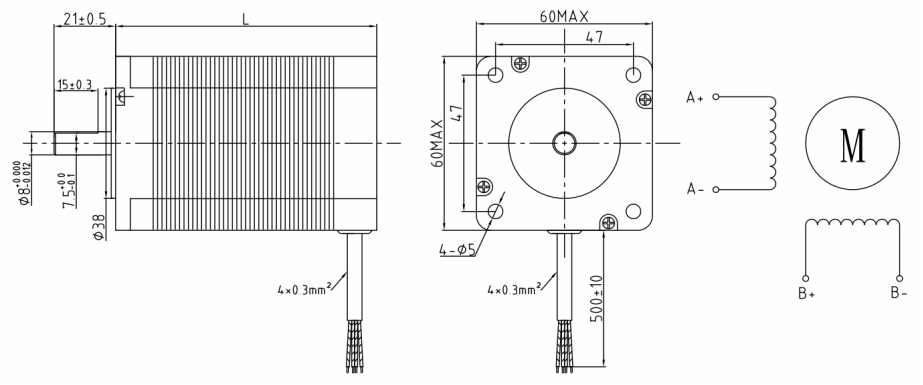
| Step Accuracy | ±5% | STEP | A+ | B+ | A- | B- | ||||||||||||||||
| Radial Force | 70N(15.5Lbs.) at end shaft | |||||||||||||||||||||
| IP Rating | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Operating Temp | -20℃ to +50℃ | 2 | - | + | + | - | ||||||||||||||||
| Insulation Class | B, 130℃ | 3 | - | - | + | + | ||||||||||||||||
| Insulation Resistance | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
| Dimensions(mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Technical Data | ||||||||||||||||||||||
| Model | Step Angle | Motor Length | Current | Resistance | Inductance | Holding Torque | Detent Torque | Inertia | Wires | Weight | ||||||||||||
| (° ) | L(mm) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (g.cm²) | (No.) | (kg) | |||||||||||||
| TH6045HS-25004 | 1.8 | 45 | 2.50 | 1.00 | 2.2 | 0.85 | 3.0 | 200.0 | 4 | 0.55 | ||||||||||||
| TH6056HS-25004 | 1.8 | 56 | 2.50 | 1.30 | 4.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6056HS-42004 | 1.8 | 56 | 4.20 | 0.40 | 1.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6065HS-30004 | 1.8 | 65 | 3.00 | 0.80 | 2.3 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6065HS-42004 | 1.8 | 65 | 4.20 | 0.55 | 1.2 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6076HS-25004 | 1.8 | 76 | 2.50 | 1.80 | 6.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-30004 | 1.8 | 76 | 3.00 | 1.00 | 3.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-42004 | 1.8 | 76 | 4.20 | 0.60 | 1.8 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6089HS-30004 | 1.8 | 89 | 3.00 | 1.40 | 5.5 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH6089HS-42004 | 1.8 | 89 | 4.20 | 0.70 | 2.8 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH60100HS-42004 | 1.8 | 100 | 4.20 | 0.70 | 3.0 | 3.00 | 16.0 | 900.0 | 4 | 1.60 | ||||||||||||
| TH60112HS-42004 | 1.8 | 112 | 4.20 | 0.85 | 3.5 | 3.60 | 16.0 | 900.0 | 4 | 1.80 | ||||||||||||
| Torque Unit Conversion: 1N.m≈10.2kgf.cm≈141.6oz.in≈8.85lb.in | ||||||||||||||||||||||
| If you need other parameters, please contact customer service. | ||||||||||||||||||||||
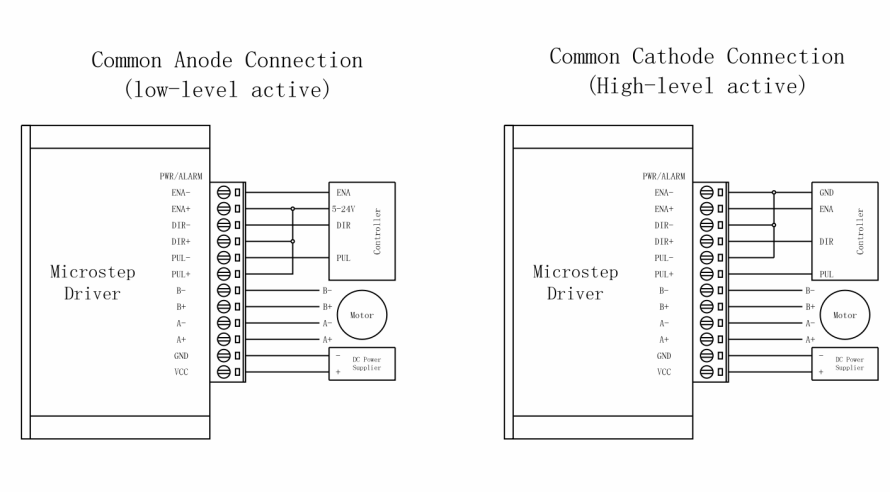
| Motor Driver Connections | ||||||||||||||||||||||
| ||||||||||||||||||||||
High-Torque Compact Industrial Motor | Nema24 | Between Nema23 and Nema34
1. 60mm frame size, offering higher torque than Nema23 in similar footprint
2. Holding torque range: 2.0–4.5Nm, step angle 1.8°
3. Optimized for high acceleration and high-speed applications
4. Available with IP65 protection and integrated encoder
Nema24 stepper motor features a 60mm square frame, filling the gap between Nema23 and Nema34. With holding torque ranging from 2.0Nm to 4.5Nm, it provides significantly higher torque than standard Nema23 while maintaining a relatively compact size. The motor uses large-diameter rotors and high-energy neodymium magnets for superior torque density. Step angle is 1.8° with ±5% non-accumulative accuracy. High-speed performance is enhanced through optimized winding configurations. We provide optional motors with closed-loop encoders, planetary gearboxes, electromagnetic brakes, and IP65-rated sealing for harsh environments.
Frame size 60mm, step angle 1.8°, holding torque 2.0–4.5Nm, rated current 2.5–6.0A, IP20–IP65, brake and encoder options.
- Heavy-duty CNC machines
- Industrial automation conveyors
- Robotic arms and manipulators
- Medical surgery robots
- Large-format 3D printers
- Semiconductor manufacturing equipment
- Printing presses
1. High torque in compact size: 4.5Nm max in 60mm frame.
2. Excellent high-speed performance: Optimized winding for high RPM.
3. Harsh environment ready: IP65 option for dust and water resistance.
4. Safety features: Brake option for holding torque when power is off.








TJX60RZ

TJW46FA

TJZ25RA

TJZ37RH

