






 |
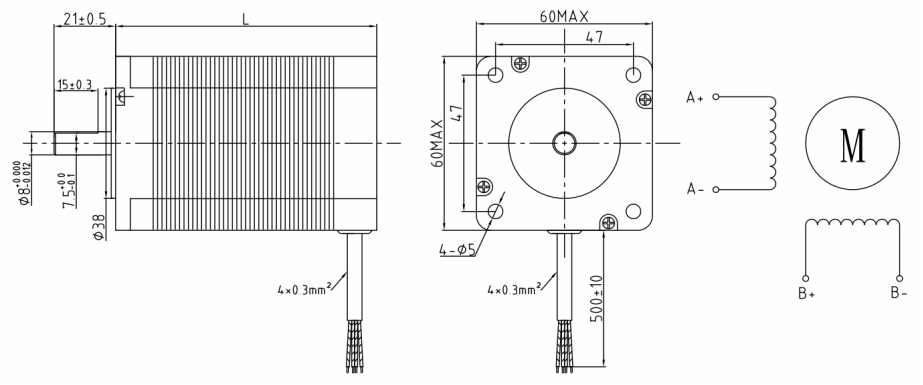
סוג | מנוע צעד היברידי | סדר תסיסה | |||||||||||||||||||
| גודל פלנجة | ריבוע 60 מ"מ | |||||||||||||||||||||
| הフェזים | 2 | |||||||||||||||||||||
| דיוק צעד | ±5% | שלב | א+ | B+ | A- | B- | ||||||||||||||||
| כוח רדיאלי | 70N(15.5Lbs.) בסוף הציר | |||||||||||||||||||||
| דירוג IP | IP40 | 1 | + | + | - | - | ||||||||||||||||
| טמפ' הפעלה | -20℃ל+50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| מחלקת חימום | B, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| התנגדות בידוד | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
| מימ"ר | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| נתונים טכניים | ||||||||||||||||||||||
| דגם | זווית צעד | אורך מנוע | נוכחי | תנגדות | אינדוקטיביות | תורן מחזיק | תורן דנט | Ineria | חוטים | משקל | ||||||||||||
| (° ) | L (מ"מ) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (g.cm²) | (מספר.) | (ק"ג) | |||||||||||||
| TH6045HS-25004 | 1.8 | 45 | 2.50 | 1.00 | 2.2 | 0.85 | 3.0 | 200.0 | 4 | 0.55 | ||||||||||||
| TH6056HS-25004 | 1.8 | 56 | 2.50 | 1.30 | 4.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6056HS-42004 | 1.8 | 56 | 4.20 | 0.40 | 1.2 | 1.60 | 4.0 | 350.0 | 4 | 0.70 | ||||||||||||
| TH6065HS-30004 | 1.8 | 65 | 3.00 | 0.80 | 2.3 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6065HS-42004 | 1.8 | 65 | 4.20 | 0.55 | 1.2 | 1.80 | 5.0 | 450.0 | 4 | 0.85 | ||||||||||||
| TH6076HS-25004 | 1.8 | 76 | 2.50 | 1.80 | 6.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-30004 | 1.8 | 76 | 3.00 | 1.00 | 3.5 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6076HS-42004 | 1.8 | 76 | 4.20 | 0.60 | 1.8 | 2.20 | 7.0 | 550.0 | 4 | 1.15 | ||||||||||||
| TH6089HS-30004 | 1.8 | 89 | 3.00 | 1.40 | 5.5 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH6089HS-42004 | 1.8 | 89 | 4.20 | 0.70 | 2.8 | 2.60 | 12.0 | 780.0 | 4 | 1.40 | ||||||||||||
| TH60100HS-42004 | 1.8 | 100 | 4.20 | 0.70 | 3.0 | 3.00 | 16.0 | 900.0 | 4 | 1.60 | ||||||||||||
| TH60112HS-42004 | 1.8 | 112 | 4.20 | 0.85 | 3.5 | 3.60 | 16.0 | 900.0 | 4 | 1.80 | ||||||||||||
| המרה של מומנט: 1N.m≈10.2kgf.cm≈141.6oz.in≈8.85lb.in | ||||||||||||||||||||||
| אם יש צורך בפרמטרים נוספים, אנא צוותו את שירות הלקוח. | ||||||||||||||||||||||
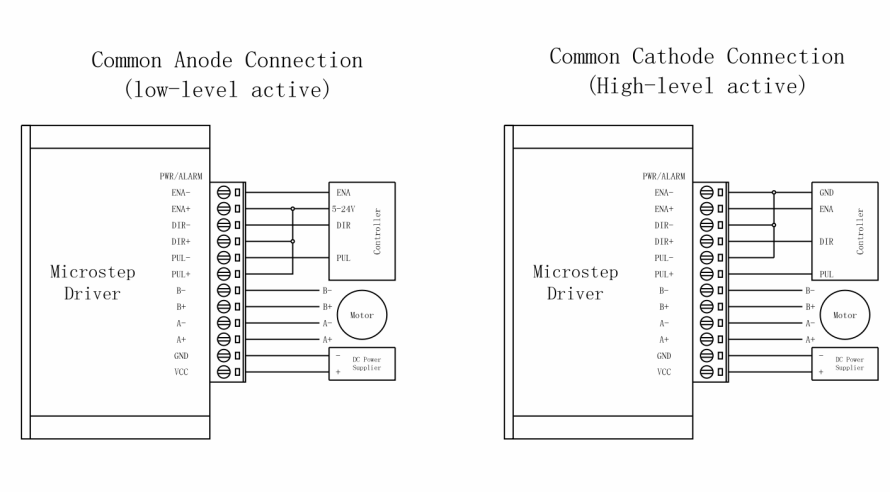
| חיבור מנוע מונע | ||||||||||||||||||||||
| ||||||||||||||||||||||
מנוע תעשייתי קומפקטי בעל מומנט גבוה | Nema24 | בין Nema23 ל-Nema34
1. גודל מסגרת 60 מ"מ, המספק מומנט גבוה יותר מאשר Nema23 בגודל דומה של מסגרת
2. טווח מומנט החזקה: 2.0–4.5 ניוטון-מטר, זווית צעד של 1.8°
3. מאופטם ליישומים הדורשים תאוצה גבוהה ומהירות גבוהה
4. זמין עם הגנה לפי דרגת אטימות IP65 ומונה משולב
המנוע הצעדתי מסוג Nema24 מתאפיין במסגרת ריבועית בגודל 60 מ"מ, ומבטא את הפער בין Nema23 ל-Nema34. עם מומנט החזקה הנע בין 2.0 ל-4.5 ניוטון-מטר, הוא מספק מומנט גבוה בהרבה לעומת Nema23 סטנדרטי תוך שומר על גודל קומפקטי יחסית. המנוע משתמש ברוטורים בעלי קוטר גדול ומגנטים חזקים מסוג ניאודימיום כדי להשיג צפיפות מומנט מעולה. זווית הצעד היא 1.8° עם דיוק לא מצטבר של ±5%. ביצועי המהירות הגבוהה משופרים באמצעות תצורות עיטוף מאופטמות. אנו מציעים כחלופה מנועים עם מונים לולאה סגורה, תיבות הילוכים פלנטריות, בלמים אלקטרו-מגנטיים וסיגום לפי דרגת אטימות IP65 לסביבות קשות.
גודל מסגרת 60 מ"מ, זווית צעד 1.8°, מומנט החזקה 2.0–4.5 ניוטון-מטר, זרם נומינלי 2.5–6.0 אמפר, דרגת הגנה IP20–IP65, אפשרויות של בלם ומונה זוויתי.
- מכונות CNC עבירות
- רצועות תחבורה לאוטומציה תעשייתית
- זרועות רובוטיות ומניפולטורים
- רובוטים לניתוחים רפואיים
- מדפסות תלת-ממד בפורמט גדול
- ציוד לייצור חצי מוליכים
- מכונות הדפסה
1. מומנט גבוה בגודל קטן: עד 4.5 ניוטון-מטר במסגרת 60 מ"מ.
2. ביצועים מצוינים במהירויות גבוהות: תיל רכיב מותאם במיוחד למהירות סיבוב גבוהה.
3. מוכן לסביבות קשות: אפשרות דרגת הגנה IP65 לנגד אבק ומים.
4. תכונות בטיחות: אפשרות בלם לכוח החזקה בעת כיבוי הזרם.








TJX60RZ

TJW46FA

TJZ25RA

TJZ37RH

