






 |
TÜÜP | Hübriid-tasev mootor | Tõusv jada | |||||||||||||||||||
| Ääriku suurus | 60mm Ruut | |||||||||||||||||||||
| Faasid | 2 | |||||||||||||||||||||
| Sammu täpsus | ±5% | Samm | A+ | B+ | - Ei, ei, ei. | B- | ||||||||||||||||
| Radiaalne jõud | 70N(15,5lb.) lõpusteljel | |||||||||||||||||||||
| IP reiting | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Töötemperatuur | -20℃kuni +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Isolatsiooni klass | B, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Isolatsioonivastus | 100 MΩ | ÜM | 4 | + | - | - | + | PÜV | ||||||||||||||
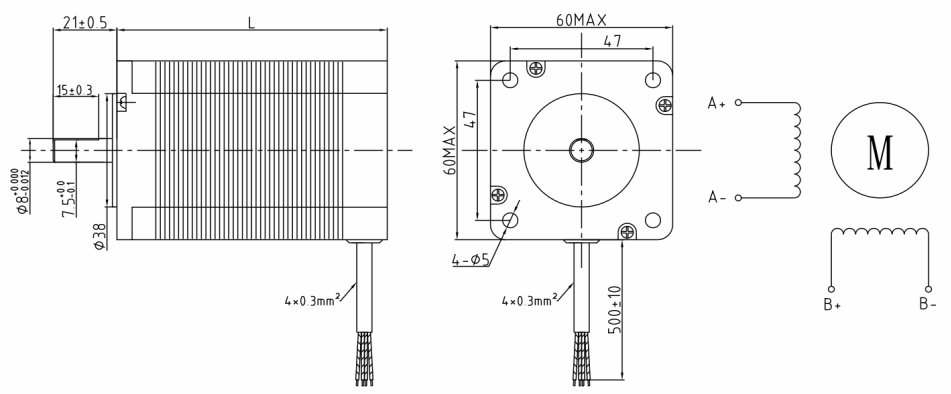
| Mõõdud (mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Tehniline andmebaas | ||||||||||||||||||||||
| Mudel | Tekkis nurk | Mootori pikkus | Praegu | Vastupanu | Induktantsus | Hoidupöördemoment | Detent moment | Inertia | Juhtmed | Kaal | ||||||||||||
| (° ) | L(mm) | (A) | (Ω) | (mH) | (N·m) | (N·cm) | (g·cm²) | (Nr.) | (KG) | |||||||||||||
| TH6045HS-25004 | 1.8 | 45 | 2.50 | 10.00 | 22.0 | 0.55 | 2.5 | 150.0 | 4 | 0.47 | ||||||||||||
| TH6056HS-25004 | 1.8 | 56 | 2.50 | 1.30 | 2.8 | 0.55 | 2.5 | 150.0 | 4 | 0.47 | ||||||||||||
| TH6056HS-42004 | 1.8 | 56 | 4.20 | 12.00 | 26.0 | 0.80 | 2.8 | 190.0 | 4 | 0.52 | ||||||||||||
| TH6065HS-30006 | 1.8 | 65 | 3.00 | 6.80 | 9.2 | 0.62 | 3.0 | 230.0 | 6 | 0.59 | ||||||||||||
| TH6065HS-42004 | 1.8 | 65 | 4.20 | 0.85 | 2.1 | 0.90 | 3.0 | 230.0 | 4 | 0.59 | ||||||||||||
| TH6076HS-25006 | 1.8 | 76 | 2.50 | 3.20 | 5.5 | 0.90 | 3.5 | 280.0 | 6 | 0.68 | ||||||||||||
| TH6076HS-30004 | 1.8 | 76 | 3.00 | 1.30 | 4.0 | 1.10 | 3.5 | 280.0 | 4 | 0.68 | ||||||||||||
| TH6076HS-42004 | 1.8 | 76 | 4.20 | 0.40 | 1.3 | 1.10 | 3.5 | 280.0 | 4 | 0.68 | ||||||||||||
| TH6089HS-30004 | 1.8 | 89 | 3.00 | 7.50 | 20.0 | 1.40 | 5.0 | 380.0 | 4 | 0.85 | ||||||||||||
| TH6089HS-42004 | 1.8 | 89 | 4.20 | 1.30 | 2.0 | 1.40 | 5.0 | 380.0 | 4 | 0.85 | ||||||||||||
| TH60100HS-42004 | 1.8 | 100 | 4.20 | 1.20 | 4.3 | 1.80 | 6.0 | 440.0 | 4 | 1.05 | ||||||||||||
| TH60112HS-42004 | 1.8 | 112 | 4.20 | 0.55 | 1.8 | 1.80 | 6.0 | 440.0 | 4 | 1.05 | ||||||||||||
| Momentiühikute teisendus: 1N.m≈10.2kgf.cm≈141.6oz.in≈8.85lb.in | ||||||||||||||||||||||
| Kui teil on vaja muude parameetritega tooteid, pöörduge palun klientiteeninduse poole. | ||||||||||||||||||||||
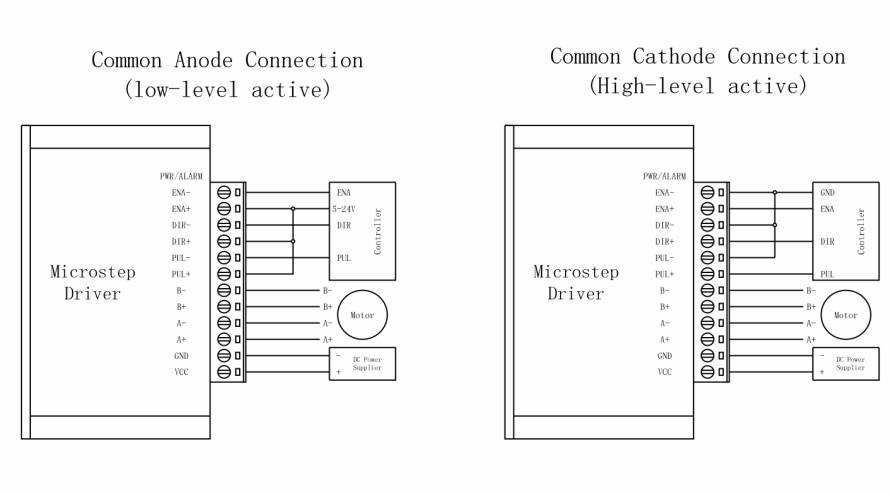
| Mootorijuhtelemendi ühendused | ||||||||||||||||||||||
| ||||||||||||||||||||||
Kõrgvõimseline tööstuslik sammumootor | Nema23 | Täpne liikumine suurte koormuste jaoks
1. 57 mm raamisuurus, mõeldud tööstusautomaatika ja suurte koormuste jaoks
2. Hoiumomenti vahemik: 1,2–3,5 Nm, sammunurk 1,8°
3. Kõrge momentitihedus ja madal temperatuuri tõus
4. Saadaval kahefaasilises, kolmefaasilises ja suletud tsüklis versioonis
Nema23 sammumootoril on 57 mm ruutkujuline flants ja see genereerib hoiumomenti 1,2 Nm kuni 3,5 Nm, mistõttu sobib see nõudlike tööstuslikkute rakenduste jaoks. Standardseks on kahefaasiline hübriidkonstruktsioon, samas kui kolmefaasilised versioonid pakuvad sujuvamat tööd ja väiksemat vibreerimist. Mootor on ehitatud kõrgkvaliteedilistest silikoonterasest lehtmetest ja tugevatest põikalaagritest, mis võimaldavad pidevat tööd suurte koormuste all. Sammunurk on 1,8° (kõrglahutusega versioonides saadaval 0,9°). Pakume valikuliselt mootoreid IP65-kaitsega, integreeritud kodeerijatega suletud tsükli juhtimiseks, pidurdusvõimalustega asendi fikseerimiseks ning planetkaardukastega momenti suurendamiseks.
Raami suurus 57 mm, sammunurk 1,8° või 0,9°, hoiutork 1,2–3,5 Nm, nimivool 2,0–5,0 A, kaitseaste IP20–IP65, valikuliselt pidur ja enkooder.
- CNC-freeseermasinaid ja marsruutijaid
- Tööstuslikke pakkimis- ja paigaldusrobotid
- Automaatsed juhitavad sõidukid (AGV-d)
- Pakendus- ja märgistusmasinad
- Tekstiilikud kuded ja kudumismasinad
- Meditsiiniline pildistusseade
- Päikesepaneelide jälgimissüsteemid
- Automaatsed ukseavajad
1. Kõrgel pöördemomendil: 1,2–3,5 Nm raskekoormusega rakendustes.
2. Tööstuslik vastupidavus: tugevad kullerid ja soojuskaitse.
3. Sulgutud ahela jaoks valmis: asukoha kontrollimiseks kodeerija integreerimine.
4. Fikseerimispidur: sisseehitatud pidur vertikaalsete või ohutuslikult kriitiliste rakenduste jaoks.








TJZ17RW

TJZ42FO

TJZ60FR

TJP60FO

