






 |
ประเภท | มอเตอร์สเต็ปเปอร์ไฮบริด | ลำดับการกระตุ้น | |||||||||||||||||||
| ขนาดหน้าแปลน | สี่เหลี่ยม 28 มม. | |||||||||||||||||||||
| เฟส | 2 | |||||||||||||||||||||
| ความแม่นยําของขั้นตอน | ±5% | ขั้นบันได | A+ | B+ | A- | B- | ||||||||||||||||
| แรงทางรัศมี | 30N(6.5Lbs.) ที่ปลายเพลา | |||||||||||||||||||||
| การจัดอันดับ IP | Ip40 | 1 | + | + | - | - | ||||||||||||||||
| อุณหภูมิในการทำงาน | -20℃ถึง +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| ประเภทความอุดหนา | B, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| ความต้านทานในการกันความร้อน | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
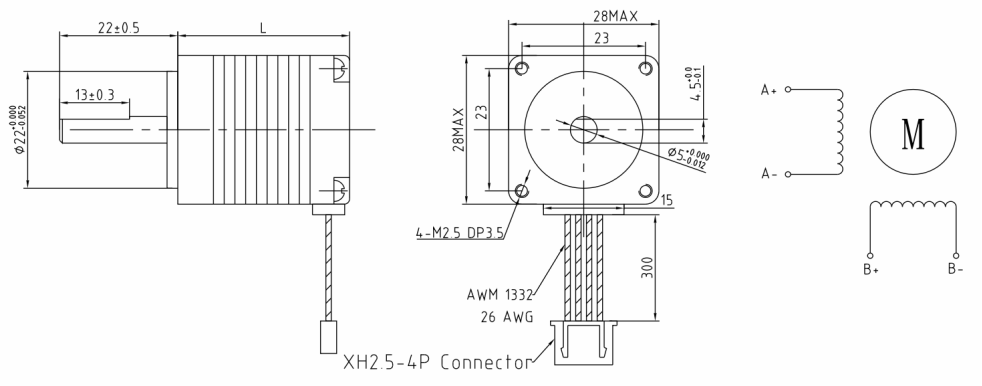
| ขนาด(มม.) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| ข้อมูลทางเทคนิค | ||||||||||||||||||||||
| รุ่น | มุมขั้น | ความยาวของมอเตอร์ | ปัจจุบัน | ความต้านทาน | ความเหนี่ยวนำ | ทอร์คการยึด | แรงบิดแบบ Detent | โมเมนตัม | สายไฟ | น้ำหนัก | ||||||||||||
| (° ) | L(มม.) | (A) | (Ω) | (มิลลิกรัม) | (นิวตัน.เมตร) | (นิวตัน.เซนติเมตร) | (กรัม.เซนติเมตร²) | (จำนวน) | (กรัม) | |||||||||||||
| TH2828HS-6004 | 1.8 | 28 | 0.60 | 4.2 | 2.2 | 0.045 | 0.3 | 6.0 | 4 | 105 | ||||||||||||
| TH2833HS-3504 | 1.8 | 33 | 0.35 | 15.0 | 9.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2833HS-6004 | 1.8 | 33 | 0.60 | 5.5 | 3.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2845HS-7004 | 1.8 | 45 | 0.70 | 7.0 | 5.0 | 0.080 | 0.6 | 11.0 | 4 | 140 | ||||||||||||
| TH2845HS-9506 | 1.8 | 45 | 0.95 | 3.4 | 1.2 | 0.060 | 0.6 | 11.0 | 6 | 140 | ||||||||||||
| TH2851HS-6004 | 1.8 | 51 | 0.60 | 9.0 | 7.2 | 0.100 | 0.8 | 13.0 | 4 | 180 | ||||||||||||
| TH2851HS-9306 | 1.8 | 51 | 0.93 | 4.6 | 1.8 | 0.080 | 0.8 | 13.0 | 6 | 180 | ||||||||||||
| การแปลงหน่วยแรงบิด: 1N.m≈10.2kgf.cm≈141.6oz.in≈8.85lb.in | ||||||||||||||||||||||
| หากคุณต้องการพารามิเตอร์อื่น ๆ กรุณาติดต่อฝ่ายบริการลูกค้า | ||||||||||||||||||||||
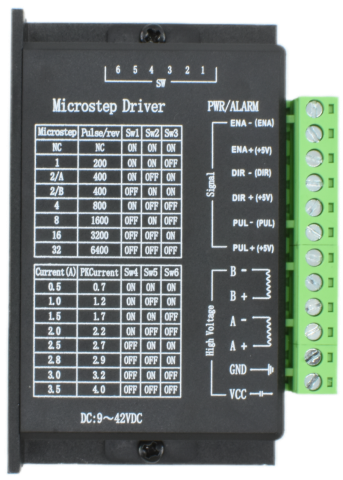
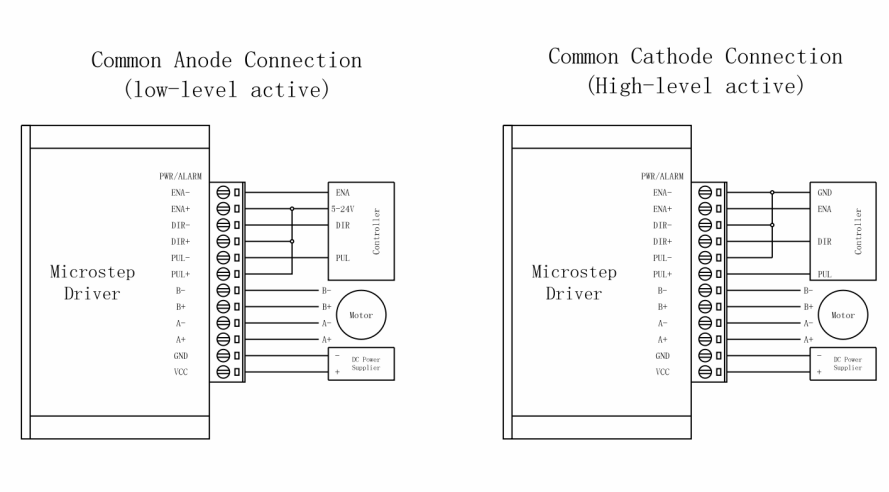
| การเชื่อมต่อไดรเวอร์มอเตอร์ | ||||||||||||||||||||||
  | ||||||||||||||||||||||
มอเตอร์สตีปเปอร์ความแม่นยำสูง | Nema11 | สมดุลระหว่างประสิทธิภาพสำหรับระบบอัตโนมัติทั่วไป
1. ขนาดกรอบ 28 มม. รูปแบบการติดตั้งตามมาตรฐานอุตสาหกรรม
2. ช่วงแรงบิดคงที่: 0.08–0.25 นิวตัน-เมตร มุมแต่ละขั้นตอน 1.8°
3. เสียงรบกวนต่ำและแรงสั่นสะเทือนต่ำที่ความเร็วปานกลางถึงสูง
4. เข้ากันได้กับเกียร์แบบดาวเคราะห์ เครื่องตรวจจับตำแหน่ง (encoder) และชุดสกรูเลื่อน (lead screw assembly)
มอเตอร์สตีปเปอร์ Nema11 เป็นมอเตอร์สตีปเปอร์แบบไฮบริดสองเฟส ที่มีหน้าแปลนสี่เหลี่ยมขนาด 28 มม. ซึ่งให้สมดุลที่ดีระหว่างขนาดและแรงบิด จึงเป็นที่นิยมใช้งานในอุปกรณ์ระบบอัตโนมัติต่างๆ มอเตอร์รุ่นนี้มีโรเตอร์ที่ผ่านการกลึงด้วยความแม่นยำสูงและแม่เหล็กถาวรคุณภาพสูง ทำให้มั่นใจได้ถึงความแม่นยำและความซ้ำได้ของแต่ละขั้นตอนอย่างสม่ำเสมอ มุมแต่ละขั้นตอนคือ 1.8° ± 5% เราจัดเตรียมมอเตอร์แบบตัวเลือกเพิ่มเติม เช่น ชนิดเพลาเดียว ชนิดสองเพลา พร้อมหรือไม่พร้อมตัวลดการสั่นสะเทือน (damper) และสามารถจับคู่กับเกียร์แบบดาวเคราะห์ขนาดเล็ก (micro planetary gearbox) เพื่อเพิ่มแรงบิดขาออก
ขนาดกรอบ 28 มม. มุมแต่ละขั้นตอน 1.8° แรงบิดคงที่ 0.08–0.25 นิวตัน-เมตร กระแสกำหนดค่า 0.5–1.2 แอมแปร์ พร้อมตัวเลือกขดลวดและเพลาแบบพิเศษตามความต้องการ
- เครื่องแกะสลักด้วยระบบ CNC
- ปั๊มฉีดยาแบบทางการแพทย์
- เครื่องเอทีเอ็มและหน่วยตรวจสอบธนบัตร
- การทำงานอัตโนมัติในสำนักงาน (เครื่องสแกนเนอร์ เครื่องถ่ายเอกสาร)
- เครื่องจักรสิ่งทอ
- อุปกรณ์จับวัตถุแบบหุ่นยนต์
1. การติดตั้งตามมาตรฐาน: ฝาครอบขนาด 28 มม. เข้ากันได้กับอุปกรณ์อัตโนมัติส่วนใหญ่
2. การเคลื่อนที่อย่างราบรื่น: ออกแบบให้ลดการสั่นสะเทือนและลดการเกิดเรโซแนนซ์ต่ำ
3. การผสานรวมอย่างยืดหยุ่น: รองรับการติดตั้งเพิ่มเติม เช่น เกียร์บ็อกซ์ เอนโคเดอร์ และสกรูเลด
4. คุ้มค่า: สมดุลระหว่างประสิทธิภาพสำหรับการใช้งานในปริมาณสูง








TJW46FA

TJP37F3650BL

TJP37R3650BL

RS775

