
Links Celeres




| Dc Planetaria Apparatus Motor directus motor planetarius | 25 Nm | 150 Watts | |||||||||||||||||||
| 6095ZY Micro motor continuus cc cum reductore planetario | Ad combinationem cum | ||||||||||||||||||||
| Codex & Frenum | |||||||||||||||||||||
| posset cum codice et freno conjungi | |||||||||||||||||||||
| TJX60RZ Series | |||||||||||||||||||||
| Delineatio Dimensionalis figūra dīmēnsiōnis (mm) | |||||||||||||||||||||
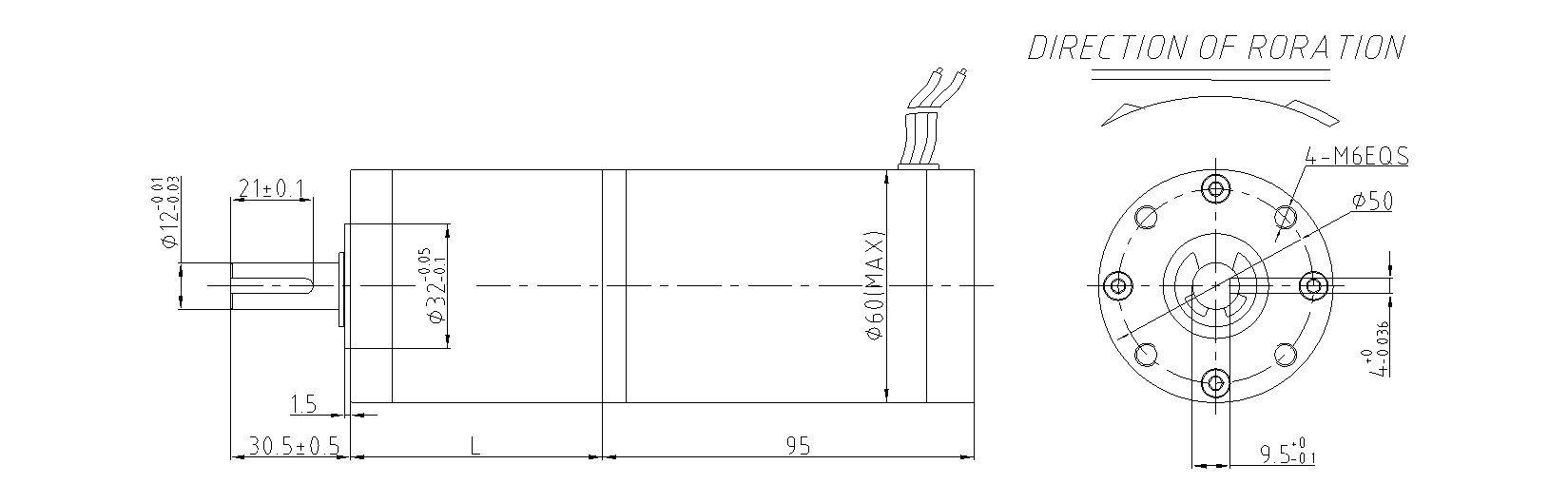 | |||||||||||||||||||||
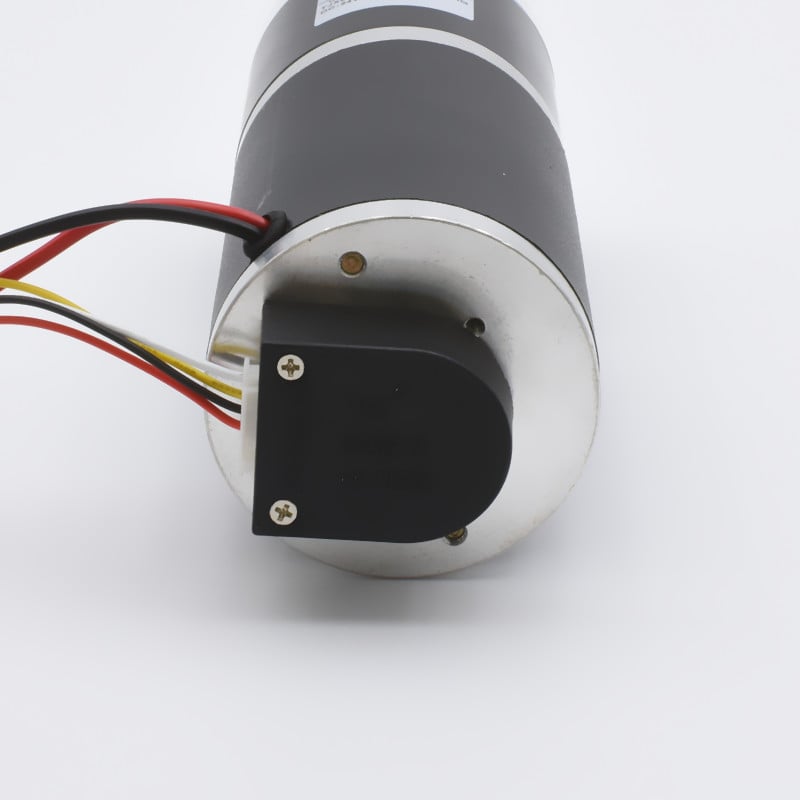
| Imāgō mōtoris imago actualis motoris | |||||||||||||||||||||
 | |||||||||||||||||||||
| Caracteristici motoris caracteres motoris | |||||||||||||||||||||
| Material Domus materies faciei installationis | Lega di zinco ligamen zincinum | ||||||||||||||||||||
| Materies catenae rotulae materies rotae dentatae | Ferrum ferrum | ||||||||||||||||||||
| Recessus retro intervalum dentis rotae | ≤2° | ||||||||||||||||||||
| Fulcra in arbores egressus fulcra in arbores egressus | Rotula Globi fulcrum globum | ||||||||||||||||||||
| Velocitas maxima input recommendata velocitas input maxima suggestenda | ≤8000RPM | ||||||||||||||||||||
| Vis radialis vis radialis | ≤25kgf | ||||||||||||||||||||
| Axial force vis axialis | ≤10kgf | ||||||||||||||||||||
| Máxima vis pressão no eixo máxima vis pressão suportada pelo eixo | ≤50kgf | ||||||||||||||||||||
| Cavum radiale interstitium radiale | ≤0.1mm | ||||||||||||||||||||
| Interstitium axiale interstitium axiale | ≤0.4mm | ||||||||||||||||||||
| Ambitus Temperatura operandi intervalum temperaturae usus | -20℃-120℃ | ||||||||||||||||||||
| Commutator structura conversionis | Purificatus | ||||||||||||||||||||
| Directio rotationis directio rotationis | CW / CCW | ||||||||||||||||||||
| Sonitus sonus | ≤70dB | ||||||||||||||||||||
| Data Technica Motoris DC parametri motoris directi currentis | |||||||||||||||||||||
| Valores ad 25-30 ℃ numeri mensurati sub temperaturae camerae | |||||||||||||||||||||
|
Formam typus |
Voltage aestimatum (V ) tensio nominalis |
Sine Onere parametri sine onere |
Ratum parametri nominales |
Stall parametri bloccati |
*Suggesio: Tabula datasheet in latere sinistro est limitata, quaesita nostra personnel pro magis informationibus parametricis. monitio: Tabula databus in latere sinistro parum habet, conlatus esto ad servitorem curae pro pluribus informatiis parametrorum. |
||||||||||||||||
|
Celeritas velocitas rotationis |
Current currens |
Celeritas velocitas rotationis |
Current currens |
Torques torques |
Productio potentia exitus |
Eff efficietia |
Torques torques |
Current currens |
|||||||||||||
| rpm | ma | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| 6095ZY | 24 | 5000 | 680 | 4000 | 4.33 | 165.20 | 69.19 | 66.59 | 495.60 | 19.86 | |||||||||||
| 6095ZY | 24 | 6000 | 850 | 4800 | 5.00 | 166.65 | 83.76 | 69.77 | 499.95 | 22.37 | |||||||||||
| Motor cum Gearbox Data Technica parametri motoris reductorii | |||||||||||||||||||||
| Data caambi parametri caambi | |||||||||||||||||||||
|
Rationis dentium ratio reductionis n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Numerus stadium dentium numerus stadium reductionis |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Longitudo cistae rotarum dentatarum longitudo cistae rotarum (mm) |
30.8 | 30.8 | 44 | 44 | 44 | 57.5 | 57.5 | 57.5 | 57.5 | 72.5 | 72.5 | 72.5 | 72.5 | 72.5 | 87.5 | 87.5 | 87.5 | 87.5 | 87.5 | ||
|
Efficientia efficietia (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 6095ZY-24V-5000R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Rated torque momentum nominale (N.M) |
0.520 | 0.730 | 1.635 | 2.292 | 3.211 | 5.174 | 7.203 | 10.145 | 14.102 | 16.298 | 22.766 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | ||
|
Rated torque momentum nominale (KG.CM) |
5.09 | 7.16 | 16.02 | 22.46 | 31.46 | 50.71 | 70.59 | 99.42 | 138.20 | 159.73 | 223.11 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | ||
|
Rated torque momentum nominale (LB.IN) |
5.87 | 8.24 | 18.46 | 25.87 | 36.25 | 58.42 | 81.33 | 114.55 | 159.22 | 184.02 | 257.05 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | ||
| 6095ZY-24V-6000R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1621.6 | 1153.8 | 438.0 | 312.5 | 223.0 | 117.6 | 84.5 | 60.0 | 43.2 | 31.7 | 22.7 | 16.3 | 11.7 | 8.3 | 6.1 | 4.4 | 3.1 | 2.2 | 1.6 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1297.3 | 923.1 | 350.4 | 250.0 | 178.4 | 94.1 | 67.6 | 48.0 | 34.5 | 25.4 | 18.2 | 13.0 | 9.4 | 6.7 | 4.9 | 3.5 | 2.5 | 1.8 | 1.3 | ||
|
Rated torque momentum nominale (N.M) |
0.524 | 0.737 | 1.650 | 2.312 | 3.239 | 5.220 | 7.266 | 10.234 | 14.226 | 16.442 | 22.966 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | ||
|
Rated torque momentum nominale (KG.CM) |
5.14 | 7.22 | 16.17 | 22.66 | 31.74 | 51.15 | 71.21 | 100.30 | 139.41 | 161.13 | 225.07 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | ||
|
Rated torque momentum nominale (LB.IN) |
5.92 | 8.32 | 18.62 | 26.10 | 36.57 | 58.93 | 82.04 | 115.55 | 160.62 | 185.64 | 259.30 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | ||
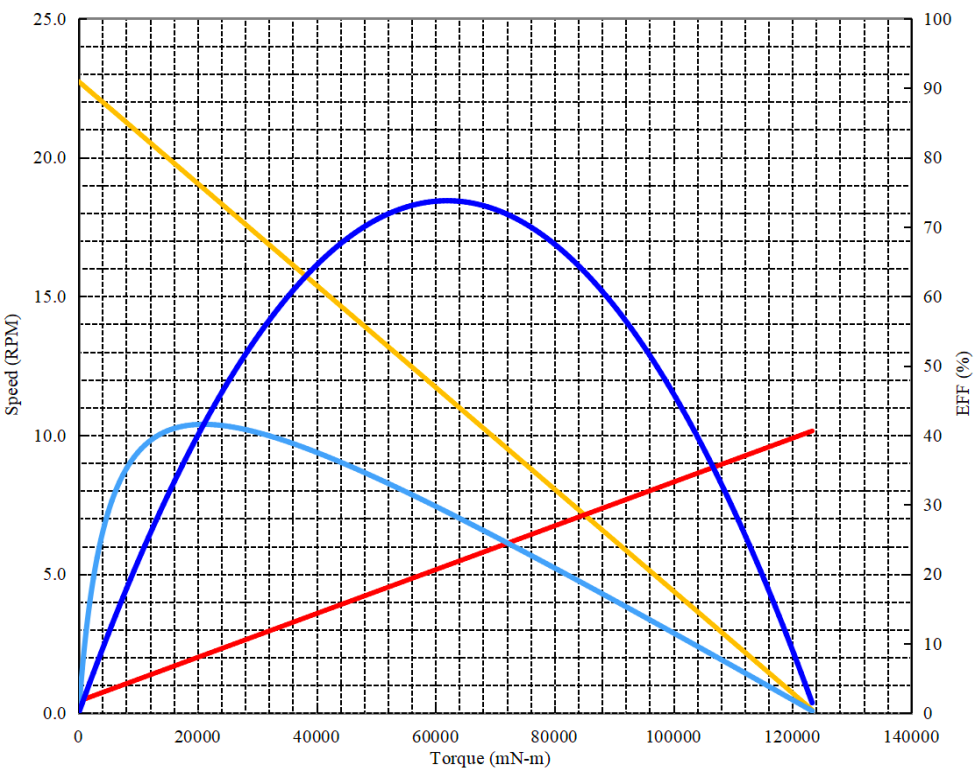
| Motor rotulae curvatae exemplum motoris decelerationis curvae | |||||||||||||||||||||
| Proiectum nomen operis : | DC Apparatus Motor | Dies data : | 2025/3/26 | Perfomantia (in temperatura ambientali 25-30 ℃) | |||||||||||||||||
| Velocitas motoris velocitas rotationis : | 6000rpm | Scala integra ambitus mensurae : | 100% | Eff | Rapidum testare ad praeventionem incrementi caloris et damni supercargi. | ||||||||||||||||
| Catena rotatoria gradus : | 4 | 100.0 | Watts | Voltage constans carga voltage constantis : | 24 | Voltae | |||||||||||||||
| Rationis dentium ratio reductionis : | 264 | 50.0 | Amp. | Directio directio : | CW\/CCW | ||||||||||||||||
 |
|||||||||||||||||||||
| Productio potentia egressus : | 41.53 | Watts | |||||||||||||||||||
| Ad maximam potentiam egressus maximi output parametri | |||||||||||||||||||||
| Productio potentia egressus : | 73.754 | Watts | |||||||||||||||||||
| Torques momentum : | 61975.3 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 11.4 | Rpm | |||||||||||||||||||
| Current currens : | 10.63 | Amperes | |||||||||||||||||||
| Productio Combinatio alia accessoria | |||||||||||||||||||||
| Accesoria nomen | Voltage voltage | Resolutio resolutio | Canalis numerus | Animadverte | |||||||||||||||||
| Magnetic Encoder magneticus encoder | 5V-24V | 13ppr | A&B | ||||||||||||||||||
| φ55-Frenum frenum | 12V-24V | / | / | ||||||||||||||||||
| Optical encoder photodiodicus encoder | 5V-24V | 100ppr, 200ppr, 256ppr, 360ppr, 400ppr, 512ppr, 1000ppr | A&B | ||||||||||||||||||
Cassette Planetaria 60 mm Sine Hiatu | TJX60RZ | <0,15° ad Ultra-Praecisionem
1. Cassette planetaria 60 mm, suffigillum RZ cum praelatione provecta
2. Hiatus ≤0,15°, momentum torquens in exitu usque ad 450 Nm
3. Designum duorum planetarum divisorum cum praelatione elastica
4. Alta rigiditas torsionalis ad applicationes positionales
TJX60RZ est cassettis planetaria 60 mm sine hiatu praecipua. Hiatus est ≤0,15° (minus quam quartus gradus). Hoc efficitur systemate praelationis duorum planetarum divisorum quod omnem interstitium inter dentes tollit. Momentum torquens in exitu est 450 Nm. Rationes reductae a 5:1 ad 100:1. Cassette aptissima est ad indexationem altissimae praecisionis, substitutionem directae actionis, et ad exigentissimas applicationes servo ubi absoluta accuratio requiritur.
Diameter 60 mm, hiatus <0,15°, momentum 450 Nm, rationes 5–100:1, IP65 optionale.
- Axes rotativi CNC altae praecisionis
- Actiones telescopiorum astronomicorum
- Robotae manupulatoriae discorum
- Systemata dirigendi launcheres missilium
1. Retrorsio ultra parva: <0,15° pro summa praecisione.
2. Torque magnum: 150 Nm etiam cum structura absque retrorsione.
3. Rigor extremus: minimus torsus sub onere.
4. Accuratio diuturna: mechanismus praeloadi conservat functionem.








TJX38RGb

TJP96FT

TJZ60RT

NEMA11

