
Links Celeres





| Dc Planetaria Apparatus Motor directus motor planetarius | 7.5 Nm | 7 Watts | |||||||||||||||||||
| 3157ZY Micro pensilis motor dc cum reductione planetaria | Ad combinationem cum | ||||||||||||||||||||
| Hall sensor encoder | |||||||||||||||||||||
| possibilitate conjunctionis cum magnetic encoder | |||||||||||||||||||||
| TJX32RX Series | |||||||||||||||||||||
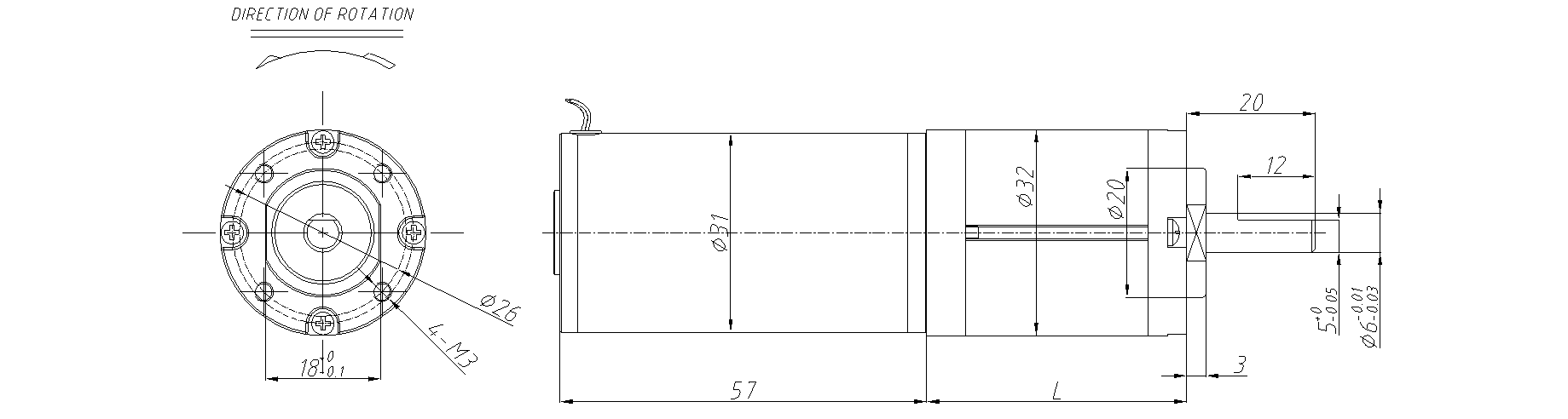
| Delineatio Dimensionalis figūra dīmēnsiōnis (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Imāgō mōtoris imago actualis motoris | |||||||||||||||||||||
 | |||||||||||||||||||||
| Caracteristici motoris caracteres motoris | |||||||||||||||||||||
| Material Domus materies faciei installationis | Lega di zinco ligamen zincinum | ||||||||||||||||||||
| Materies catenae rotulae materies rotae dentatae | Metallurgia pulveris metallurgia in pulvere | ||||||||||||||||||||
| Recessus retro intervalum dentis rotae | ≤2° | ||||||||||||||||||||
| Fulcra in arbores egressus fulcra in arbores egressus | Rotula Globi fulcrum globum | ||||||||||||||||||||
| Velocitas maxima input recommendata velocitas input maxima suggestenda | ≤10000RPM | ||||||||||||||||||||
| Vis radialis vis radialis | ≤6kgf | ||||||||||||||||||||
| Axial force vis axialis | ≤3kgf | ||||||||||||||||||||
| Máxima vis pressão no eixo máxima vis pressão suportada pelo eixo | ≤13kgf | ||||||||||||||||||||
| Cavum radiale interstitium radiale | ≤0.1mm | ||||||||||||||||||||
| Interstitium axiale interstitium axiale | ≤0.3mm | ||||||||||||||||||||
| Ambitus Temperatura operandi intervalum temperaturae usus | -20℃-120℃ | ||||||||||||||||||||
| Commutator structura conversionis | Purificatus | ||||||||||||||||||||
| Directio rotationis directio rotationis | CW / CCW | ||||||||||||||||||||
| Sonitus sonus | ≤55dB | ||||||||||||||||||||
| Data Technica Motoris DC parametri motoris directi currentis | |||||||||||||||||||||
| Valores ad 25-30 ℃ numeri mensurati sub temperaturae camerae | |||||||||||||||||||||
|
Formam typus |
Voltage aestimatum (V ) tensio nominalis |
Sine Onere parametri sine onere |
Ratum parametri nominales |
Stall parametri bloccati |
*Suggesio: Tabula datasheet in latere sinistro est limitata, quaesita nostra personnel pro magis informationibus parametricis. monitio: Tabula databus in latere sinistro parum habet, conlatus esto ad servitorem curae pro pluribus informatiis parametrorum. |
||||||||||||||||
|
Celeritas velocitas rotationis |
Current currens |
Celeritas velocitas rotationis |
Current currens |
Torques torques |
Productio potentia exitus |
Eff efficietia |
Torques torques |
Current currens |
|||||||||||||
| rpm | ma | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| ZY3157 | 12 | 5000 | 138 | 4000 | 0.35 | 6.54 | 2.74 | 65.47 | 19.62 | 1.70 | |||||||||||
| ZY3157 | 24 | 5000 | 70 | 4000 | 0.18 | 6.89 | 2.89 | 65.29 | 20.67 | 0.95 | |||||||||||
| Motor cum Gearbox Data Technica parametri motoris reductorii | |||||||||||||||||||||
| Data caambi parametri caambi | |||||||||||||||||||||
|
Rationis dentium ratio reductionis n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Numerus stadium dentium numerus stadium reductionis |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Longitudo cistae rotarum dentatarum longitudo cistae rotarum (mm) |
21.4 | 21.4 | 27.7 | 27.7 | 27.7 | 34 | 34 | 34 | 34 | 40.4 | 40.4 | 40.4 | 40.4 | 40.4 | 46.7 | 46.7 | 46.7 | 46.7 | 46.7 | ||
|
Efficientia efficietia (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| ZY3157-12V-5000R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Rated torque momentum nominale (N.M) |
0.021 | 0.029 | 0.065 | 0.091 | 0.127 | 0.205 | 0.285 | 0.402 | 0.558 | 0.645 | 0.901 | 1.260 | 1.748 | 2.461 | 2.835 | 3.967 | 5.545 | 7.500 | 7.500 | ||
|
Rated torque momentum nominale (KG.CM) |
0.20 | 0.28 | 0.63 | 0.89 | 1.25 | 2.01 | 2.79 | 3.94 | 5.47 | 6.32 | 8.83 | 12.35 | 17.13 | 24.12 | 27.78 | 38.87 | 54.34 | 73.50 | 73.50 | ||
|
Rated torque momentum nominale (LB.IN) |
0.23 | 0.33 | 0.73 | 1.02 | 1.44 | 2.31 | 3.22 | 4.53 | 6.30 | 7.29 | 10.18 | 14.22 | 19.74 | 27.79 | 32.01 | 44.79 | 62.61 | 84.68 | 84.68 | ||
| ZY3157-24V-5000R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Rated torque momentum nominale (N.M) |
0.022 | 0.030 | 0.068 | 0.096 | 0.134 | 0.216 | 0.300 | 0.423 | 0.588 | 0.680 | 0.950 | 1.327 | 1.841 | 2.593 | 2.987 | 4.179 | 5.842 | 7.500 | 7.500 | ||
|
Rated torque momentum nominale (KG.CM) |
0.21 | 0.30 | 0.67 | 0.94 | 1.31 | 2.11 | 2.94 | 4.15 | 5.76 | 6.66 | 9.31 | 13.01 | 18.05 | 25.41 | 29.27 | 40.96 | 57.25 | 73.50 | 73.50 | ||
|
Rated torque momentum nominale (LB.IN) |
0.24 | 0.34 | 0.77 | 1.08 | 1.51 | 2.44 | 3.39 | 4.78 | 6.64 | 7.68 | 10.72 | 14.98 | 20.79 | 29.28 | 33.72 | 47.19 | 65.96 | 84.68 | 84.68 | ||
| Motor rotulae curvatae exemplum motoris decelerationis curvae | |||||||||||||||||||||
| Proiectum nomen operis : | DC Apparatus Motor | Dies data : | 2025/3/26 | Perfomantia (in temperatura ambientali 25-30 ℃) | |||||||||||||||||
| Velocitas motoris velocitas rotationis : | 5000RPM | Scala integra ambitus mensurae : | 100% | Eff | Rapidum testare ad praeventionem incrementi caloris et damni supercargi. | ||||||||||||||||
| Catena rotatoria gradus : | 4 | 5.0 | Watts | Voltage constans carga voltage constantis : | 24 | Voltae | |||||||||||||||
| Rationis dentium ratio reductionis : | 189 | 5.0 | Amp. | Directio directio : | CW\/CCW | ||||||||||||||||
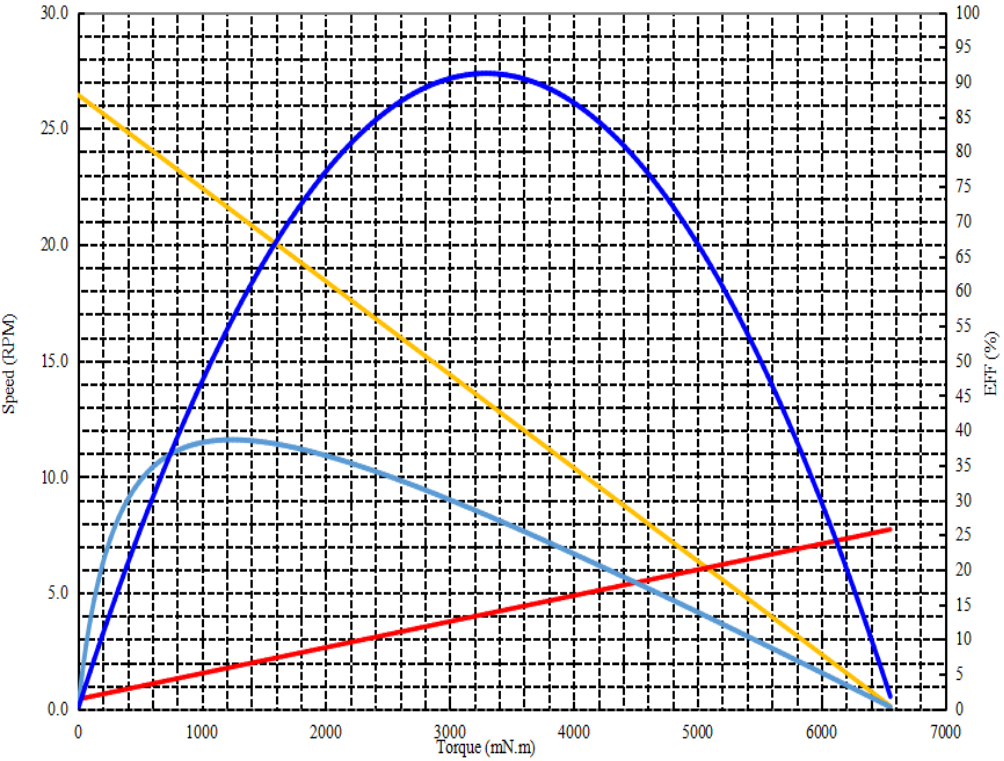 |
Absque onere parametri sine onere | ||||||||||||||||||||
| Celeritas velocitas rotationis : | 26.5 | Rpm | |||||||||||||||||||
| Current currens : | 0.07 | Amperes | |||||||||||||||||||
| Maximi parametri instantanei parametri maximi instantanei | |||||||||||||||||||||
| Torques momentum : | 6370.05 | mN-m | |||||||||||||||||||
| Current currens : | 1.30 | Amperes | |||||||||||||||||||
| Ad maximam efficientiam parametri puncti maximae efficientiae | |||||||||||||||||||||
| Efficientia efficietia : | 38.6 | % | |||||||||||||||||||
| Torques momentum : | 1242.8 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 21.5 | Rpm | |||||||||||||||||||
| Current currens : | 0.30 | Amperes | |||||||||||||||||||
| Productio potentia egressus : | 2.79 | Watts | |||||||||||||||||||
| Ad maximam potentiam egressus maximi output parametri | |||||||||||||||||||||
| Productio potentia egressus : | 4.562 | Watts | |||||||||||||||||||
| Torques momentum : | 3294.1 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 13.2 | Rpm | |||||||||||||||||||
| Current currens : | 0.68 | Amperes | |||||||||||||||||||
| Productio Combinatio alia accessoria | |||||||||||||||||||||
| Accesoria nomen | Voltage voltage | Resolutio resolutio | Canalis numerus | Animadverte | |||||||||||||||||
| Magnetic Encoder magneticus encoder | 5V-24V | 12ppr | A&B | ||||||||||||||||||
Extra-Alta Torque 32 mm Caelum Planetarium | TJX32RX | 35 Nm Continuum
1. Caelum planetarium 32 mm, suffigillum RX pro torque extremo
2. Torque exiens usque ad 35 Nm continuum, maximum 55 Nm
3. Dentes carbonati et politi (HRC 60–62)
4. Ferrea gravia rotulorum conicorum in axe exiens
TJX32RX est caelum planetarium 32 mm maximum torque praebens, quod 35 Nm torque continuum et 55 Nm torque maximum dat. Versio RX utitur dentibus carbonatis et politis (HRC 60–62), portatore planetarum refortificato, et rotulis conicis in axe exiens. Rationes reductae a 5:1 ad 200:1. Laxitas <0,8°. Idoneum ad applicationes ubi caelum maius non capiatur.
Diameter 32 mm, torque 25–35 Nm (maximum 55 Nm), rationes 5–200:1, laxitas <0,8°.
- Actuatores acceleratoris motocycletarum electricarum
- Prehensoria industrialia gravia
- Instrumenta machinarum aedificatoriarum
- Actuatores lineares altae vi
1. Torque extremum: 35 Nm continuus in formae 32 mm.
2. Dentes ultra-duri: HRC 60–62 ad resistentiam abrasi.
3. Imprecisio positionis exacta: <0,8° pro positione.








TJX38RGb

TJZ37RGb

TJP37RQ

TJX12RN30

