
Links Celeres





| Dc Worm Apparatus Motor motor vermicularis directus | 1 Nm | 2 Watti | |||||||||||||||||||
| RF370 Micro motor continuus cum reductore vermiculari | Ad combinationem cum | ||||||||||||||||||||
| Hall sensor encoder | |||||||||||||||||||||
| possibilitate conjunctionis cum magnetic encoder | |||||||||||||||||||||
| TJW46FA Series | |||||||||||||||||||||
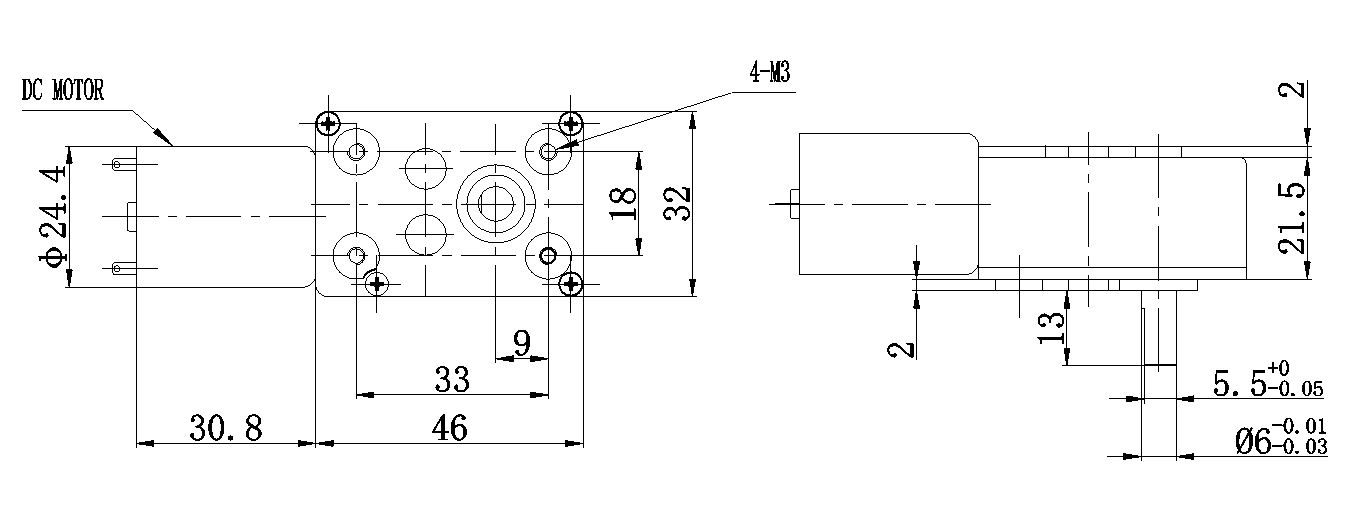
| Delineatio Dimensionalis figūra dīmēnsiōnis (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
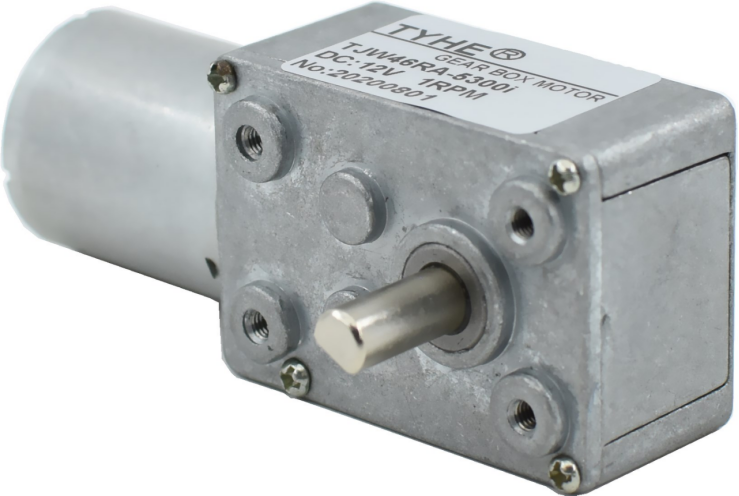
| Imāgō mōtoris imago actualis motoris | |||||||||||||||||||||
 | |||||||||||||||||||||
| Caracteristici motoris caracteres motoris | |||||||||||||||||||||
| Material Domus materies faciei installationis | Lega di zinco ligamen zincinum | ||||||||||||||||||||
| Materies catenae rotulae materies rotae dentatae | Metallurgia pulveris metallurgia in pulvere | ||||||||||||||||||||
| Recessus retro intervalum dentis rotae | ≤2° | ||||||||||||||||||||
| Fulcra in arbores egressus fulcra in arbores egressus | Oil bearing cum oleo fibrae | ||||||||||||||||||||
| Velocitas maxima input recommendata velocitas input maxima suggestenda | ≤12000RPM | ||||||||||||||||||||
| Vis radialis vis radialis | ≤1kgf | ||||||||||||||||||||
| Axial force vis axialis | ≤0.7kgf | ||||||||||||||||||||
| Máxima vis pressão no eixo máxima vis pressão suportada pelo eixo | ≤10kgf | ||||||||||||||||||||
| Cavum radiale interstitium radiale | ≤0.05mm | ||||||||||||||||||||
| Interstitium axiale interstitium axiale | ≤0.3mm | ||||||||||||||||||||
| Ambitus Temperatura operandi intervalum temperaturae usus | -20℃-120℃ | ||||||||||||||||||||
| Commutator structura conversionis | Purificatus | ||||||||||||||||||||
| Directio rotationis directio rotationis | CW / CCW | ||||||||||||||||||||
| Sonitus sonus | ≤40dB | ||||||||||||||||||||
| Data Technica Motoris DC parametri motoris directi currentis | |||||||||||||||||||||
| Valores ad 25-30 ℃ numeri mensurati sub temperaturae camerae | |||||||||||||||||||||
|
Formam typus |
Voltage aestimatum (V ) tensio nominalis |
Sine Onere parametri sine onere |
Ratum parametri nominales |
Stall parametri bloccati |
*Suggesio: Tabula datasheet in latere sinistro est limitata, quaesita nostra personnel pro magis informationibus parametricis. monitio: Tabula databus in latere sinistro parum habet, conlatus esto ad servitorem curae pro pluribus informatiis parametrorum. |
||||||||||||||||
|
Celeritas velocitas rotationis |
Current currens |
Celeritas velocitas rotationis |
Current currens |
Torques torques |
Productio potentia exitus |
Eff efficietia |
Torques torques |
Current currens |
|||||||||||||
| rpm | ma | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RF370 | 6 | 6500 | 70 | 5200 | 0.23 | 1.58 | 0.86 | 62.34 | 4.74 | 1.50 | |||||||||||
| RF370 | 12 | 6500 | 30 | 5200 | 0.12 | 1.72 | 0.94 | 62.86 | 5.16 | 0.95 | |||||||||||
| Motor cum Gearbox Data Technica parametri motoris reductorii | |||||||||||||||||||||
| Data caambi parametri caambi | |||||||||||||||||||||
|
Rationis dentium ratio reductionis n : 1 |
40 | 69 | 100 | 180 | 255 | 330 | 950 | 1170 | 1450 | 1650 | 5300 | ||||||||||
|
Numerus stadium dentium numerus stadium reductionis |
2 | 2 | 2 | 3 | 3 | 3 | 4 | 4 | 5 | 6 | 6 | ||||||||||
|
Mensura Fores dimensio cistae rotarum dentatarum (mm) |
46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | 46*32 | ||||||||||
|
Efficientia efficietia (%) |
0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.44 | 0.38 | 0.38 | ||||||||||
| RF370-6V-6500R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
162.5 | 94.2 | 65.0 | 36.1 | 25.5 | 19.7 | 6.8 | 5.6 | 4.5 | 3.9 | 1.2 | ||||||||||
|
Celeritas Aestimata velocitas nominalis (rpm) |
130.0 | 75.4 | 52.0 | 28.9 | 20.4 | 15.8 | 5.5 | 4.4 | 3.6 | 3.2 | 1.0 | ||||||||||
|
Rated torque momentum nominale (N.M) |
0.046 | 0.079 | 0.114 | 0.175 | 0.247 | 0.320 | 0.784 | 0.965 | 1.000 | 0.983 | 1.000 | ||||||||||
|
Rated torque momentum nominale (KG.CM) |
0.45 | 0.77 | 1.12 | 1.71 | 2.42 | 3.14 | 7.68 | 9.46 | 9.80 | 9.64 | 9.80 | ||||||||||
|
Rated torque momentum nominale (LB.IN) |
0.52 | 0.89 | 1.29 | 1.97 | 2.79 | 3.62 | 8.85 | 10.90 | 11.29 | 11.10 | 11.29 | ||||||||||
| RF370-12V-6500R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
162.5 | 94.2 | 65.0 | 36.1 | 25.5 | 19.7 | 6.8 | 5.6 | 4.5 | 3.9 | 1.2 | ||||||||||
|
Celeritas Aestimata velocitas nominalis (rpm) |
130.0 | 75.4 | 52.0 | 28.9 | 20.4 | 15.8 | 5.5 | 4.4 | 3.6 | 3.2 | 1.0 | ||||||||||
|
Rated torque momentum nominale (N.M) |
0.050 | 0.086 | 0.124 | 0.190 | 0.269 | 0.349 | 0.853 | 1.000 | 1.000 | 1.000 | 1.000 | ||||||||||
|
Rated torque momentum nominale (KG.CM) |
0.49 | 0.84 | 1.22 | 1.86 | 2.64 | 3.42 | 8.36 | 9.80 | 9.80 | 9.80 | 9.80 | ||||||||||
|
Rated torque momentum nominale (LB.IN) |
0.56 | 0.97 | 1.40 | 2.15 | 3.04 | 3.94 | 9.63 | 11.29 | 11.29 | 11.29 | 11.29 | ||||||||||
| Motor rotulae curvatae exemplum motoris decelerationis curvae | |||||||||||||||||||||
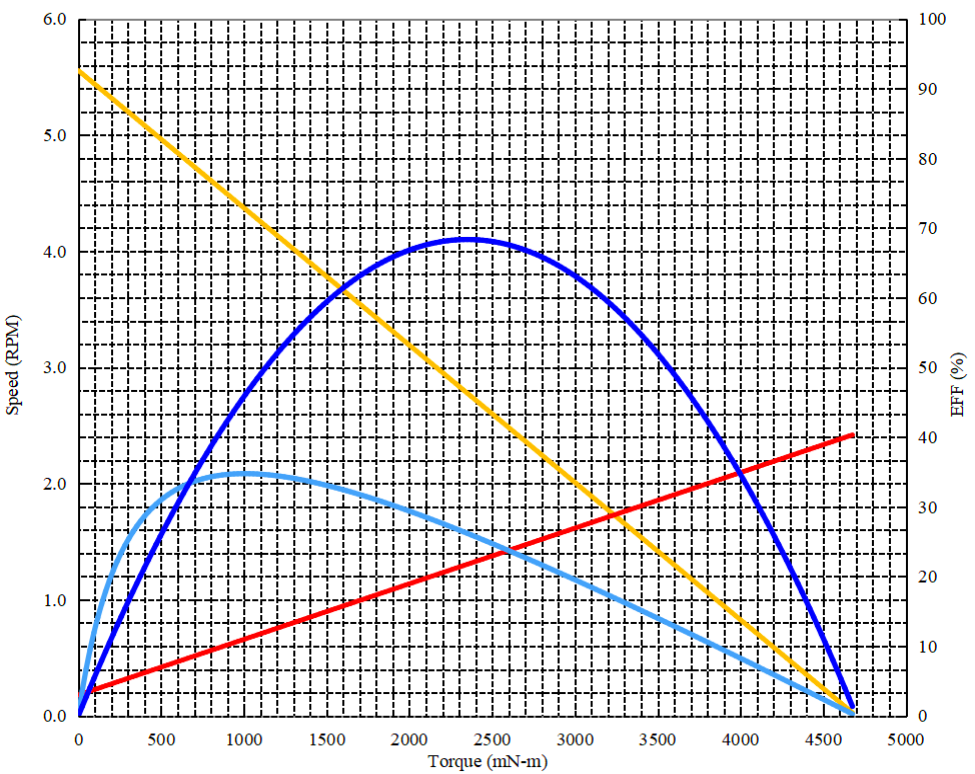
| Proiectum nomen operis : | DC Apparatus Motor | Dies data : | 2025/3/26 | Perfomantia (in temperatura ambientali 25-30 ℃) | |||||||||||||||||
| Velocitas motoris velocitas rotationis : | 6500RPM | Full scale mensura: | 100% | Eff | Rapidum testare ad praeventionem incrementi caloris et damni supercargi. | ||||||||||||||||
| Catena rotatoria gradus : | 4 | 1.0 | Watts | Voltage constans carga voltage constantis : | 12 | Voltae | |||||||||||||||
| Rationis dentium ratio reductionis : | 1170 | 1.0 | Amp. | Directio directio : | CW\/CCW | ||||||||||||||||
 |
Absque onere parametri sine onere | ||||||||||||||||||||
| Celeritas velocitas rotationis : | 5.6 | Rpm | |||||||||||||||||||
| Current currens : | 0.030 | Amperes | |||||||||||||||||||
| Maximi parametri instantanei parametri maximi instantanei | |||||||||||||||||||||
| Torques momentum : | 4610.9 | mN-m | |||||||||||||||||||
| Current currens : | 0.405 | Amperes | |||||||||||||||||||
| Ad maximam efficientiam parametri puncti maximae efficientiae | |||||||||||||||||||||
| Efficientia efficietia : | 34.8 | % | |||||||||||||||||||
| Torques momentum : | 1005.46 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 4.4 | Rpm | |||||||||||||||||||
| Current currens : | 0.110 | Amperes | |||||||||||||||||||
| Productio potentia egressus : | 0.46 | Watts | |||||||||||||||||||
| Ad maximam potentiam egressus maximi output parametri | |||||||||||||||||||||
| Productio potentia egressus : | 0.683 | Watts | |||||||||||||||||||
| Torques momentum : | 2349.9 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 2.8 | Rpm | |||||||||||||||||||
| Current currens : | 0.22 | Amperes | |||||||||||||||||||
| Productio Combinatio alia accessoria | |||||||||||||||||||||
| Accesoria nomen | Voltage voltage | Resolutio resolutio | Canalis numerus | Animadverte | |||||||||||||||||
| Magnetic Encoder magneticus encoder | 5V-24V | 12ppr | A&B | ||||||||||||||||||
Motor Vermis Compactus | TJW46FA | Altum Rationem Reductionis et Facultas Sese Ipsa Claudi
1. Distantia centri 46 mm, compacta constructio anguli recti ad installationes in spatiis restrictis
2. Momentum torquens ad 1,5 Nm, ratio reductionis a 5:1 usque ad 80:1
3. Insignis facultas sese ipsa claudi impedit rotationem inversam (secundum rationem)
4. Operatio silens cum transmissione motus leni
TJW46FA est motor compactus cum dente helicoidali, cuius distantia centrorum est 46 mm et cuius designatio axis producti est angulus rectus. Configuratio vermis et rotae vermiformis praebet altas rationes reductivas in una tantum stage, simul parvam superficiem occupans. Proprietas se ipsam constringendi (disponibilis in quibusdam rationibus) impedit motum inversum, id quod eum ad usus sustentandi et elevandi optime aptat. Cella dentata ex alluminio per fusionem in formam effusum fabricata est, ut bene calorem dissipet et rigorem structuralem praebet. Motores optionales, ut sunt motores CC cum spazzulis, motores CC sine spazzulis, et motores passuum, nobis suppeditantur, qui cum cassetta dentata TJW46FA vermiformi ad varias exigentias velocitatis et momenti torque combinari possunt.
Distantia centrorum 46 mm, ratio reductiva 5–80:1, momentum torque productum usque ad 1,5 Nm, potestas input usque ad 60 W, proprietas se ipsam constringendi disponibilis in rationibus ≥30:1.
— Lecti hospitalis electrici et machinae elevandae aegrotorum
— Portae glissantes automaticae
— Systemata solaris observationis
— Scribaniae officiorum regulabiles
- Parvae systemata convectricia
— Machinae vendentes
1. Design compactus anguli recti: Spatium installationis consumit minus quam multiplicatores in linea.
2. Functio se ipsam cludentis: Rotationem inversam impedit ad usus qui ad tutelam pertinent.
3. Operatio silens: Ensis verminis dentatus motum lenem et sine strepitu confert.
4. Magna reductio in una tantum phasī: Usque ad 80:1 absque pluribus phasibus.








TJP64FH

TJP102FN

TJP102FR

TJP33RM

