
Links Celeres





| Dc Planetaria Apparatus Motor directus motor planetarius | 7.5 Nm | 5 Watts | |||||||||||||||||||
| RS385 Micro dc motor cum pectine planetario | Ad combinationem cum | ||||||||||||||||||||
| Hall sensor encoder | |||||||||||||||||||||
| possibilitate conjunctionis cum magnetic encoder | |||||||||||||||||||||
| TJX32RL Series | |||||||||||||||||||||
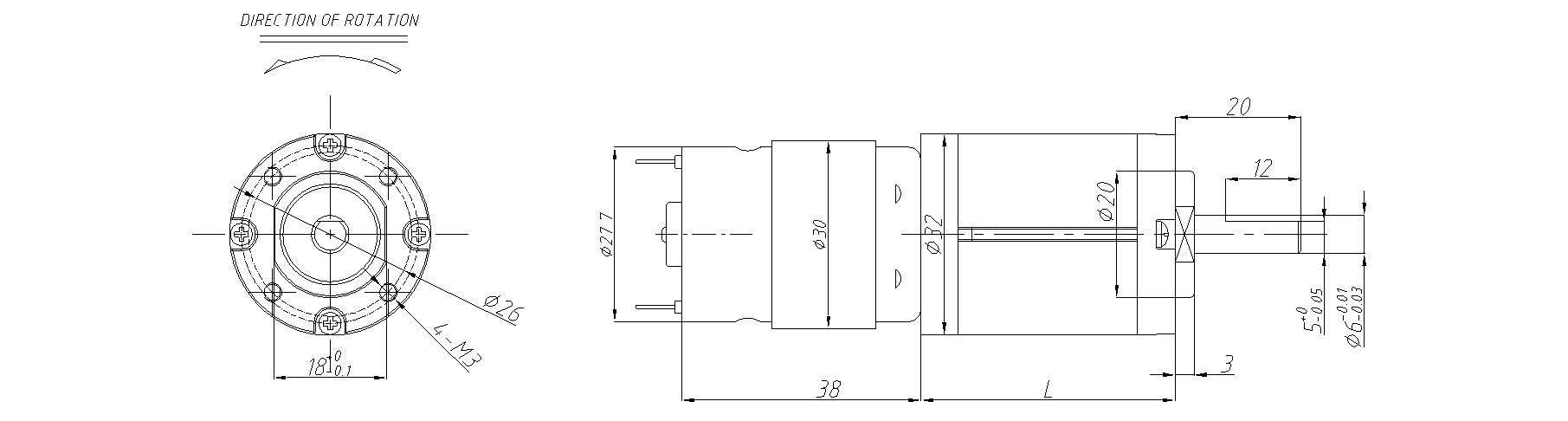
| Delineatio Dimensionalis figūra dīmēnsiōnis (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Imāgō mōtoris imago actualis motoris | |||||||||||||||||||||
 | |||||||||||||||||||||
| Caracteristici motoris caracteres motoris | |||||||||||||||||||||
| Material Domus materies faciei installationis | Lega di zinco ligamen zincinum | ||||||||||||||||||||
| Materies catenae rotulae materies rotae dentatae | Metallurgia pulveris metallurgia in pulvere | ||||||||||||||||||||
| Recessus retro intervalum dentis rotae | ≤2° | ||||||||||||||||||||
| Fulcra in arbores egressus fulcra in arbores egressus | Rotula Globi fulcrum globum | ||||||||||||||||||||
| Velocitas maxima input recommendata velocitas input maxima suggestenda | ≤10000RPM | ||||||||||||||||||||
| Vis radialis vis radialis | ≤6kgf | ||||||||||||||||||||
| Axial force vis axialis | ≤3kgf | ||||||||||||||||||||
| Máxima vis pressão no eixo máxima vis pressão suportada pelo eixo | ≤13kgf | ||||||||||||||||||||
| Cavum radiale interstitium radiale | ≤0.1mm | ||||||||||||||||||||
| Interstitium axiale interstitium axiale | ≤0.3mm | ||||||||||||||||||||
| Ambitus Temperatura operandi intervalum temperaturae usus | -20℃-120℃ | ||||||||||||||||||||
| Commutator structura conversionis | Purificatus | ||||||||||||||||||||
| Directio rotationis directio rotationis | CW / CCW | ||||||||||||||||||||
| Sonitus sonus | ≤55dB | ||||||||||||||||||||
| Data Technica Motoris DC parametri motoris directi currentis | |||||||||||||||||||||
| Valores ad 25-30 ℃ numeri mensurati sub temperaturae camerae | |||||||||||||||||||||
|
Formam typus |
Voltage aestimatum (V ) tensio nominalis |
Sine Onere parametri sine onere |
Ratum parametri nominales |
Stall parametri bloccati |
*Suggesio: Tabula datasheet in latere sinistro est limitata, quaesita nostra personnel pro magis informationibus parametricis. monitio: Tabula databus in latere sinistro parum habet, conlatus esto ad servitorem curae pro pluribus informatiis parametrorum. |
||||||||||||||||
|
Celeritas velocitas rotationis |
Current currens |
Celeritas velocitas rotationis |
Current currens |
Torques torques |
Productio potentia exitus |
Eff efficietia |
Torques torques |
Current currens |
|||||||||||||
| rpm | ma | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RS385 | 12 | 4600 | 110 | 3680 | 0.25 | 4.98 | 1.92 | 64.83 | 14.94 | 0.98 | |||||||||||
| RS385 | 24 | 5500 | 55 | 4400 | 0.15 | 5.10 | 2.35 | 64.20 | 15.30 | 0.84 | |||||||||||
| Motor cum Gearbox Data Technica parametri motoris reductorii | |||||||||||||||||||||
| Data caambi parametri caambi | |||||||||||||||||||||
|
Rationis dentium ratio reductionis n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Numerus stadium dentium numerus stadium reductionis |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Longitudo cistae rotarum dentatarum longitudo cistae rotarum (mm) |
21.4 | 21.4 | 27.7 | 27.7 | 27.7 | 34 | 34 | 34 | 34 | 40.4 | 40.4 | 40.4 | 40.4 | 40.4 | 46.7 | 46.7 | 46.7 | 46.7 | 46.7 | ||
|
Efficientia efficietia (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RS385-12V-4600R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1243.2 | 884.6 | 335.8 | 239.6 | 171.0 | 90.2 | 64.8 | 46.0 | 33.1 | 24.3 | 17.4 | 12.5 | 9.0 | 6.4 | 4.7 | 3.4 | 2.4 | 1.7 | 1.3 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
994.6 | 707.7 | 268.6 | 191.7 | 136.8 | 72.2 | 51.8 | 36.8 | 26.5 | 19.5 | 13.9 | 10.0 | 7.2 | 5.1 | 3.8 | 2.7 | 1.9 | 1.4 | 1.0 | ||
|
Rated torque momentum nominale (N.M) |
0.016 | 0.022 | 0.049 | 0.069 | 0.097 | 0.156 | 0.217 | 0.306 | 0.425 | 0.491 | 0.686 | 0.959 | 1.331 | 1.874 | 2.159 | 3.021 | 4.223 | 5.904 | 7.500 | ||
|
Rated torque momentum nominale (KG.CM) |
0.15 | 0.22 | 0.48 | 0.68 | 0.95 | 1.53 | 2.13 | 3.00 | 4.17 | 4.81 | 6.73 | 9.40 | 13.04 | 18.37 | 21.16 | 29.60 | 41.38 | 57.86 | 73.50 | ||
|
Rated torque momentum nominale (LB.IN) |
0.18 | 0.25 | 0.56 | 0.78 | 1.09 | 1.76 | 2.45 | 3.45 | 4.80 | 5.55 | 7.75 | 10.83 | 15.03 | 21.16 | 24.37 | 34.10 | 47.68 | 66.66 | 84.68 | ||
| RS385-24V-5500R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1486.5 | 1057.7 | 401.5 | 286.5 | 204.5 | 107.8 | 77.5 | 55.0 | 39.6 | 29.1 | 20.8 | 14.9 | 10.7 | 7.6 | 5.6 | 4.0 | 2.9 | 2.1 | 1.5 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1189.2 | 846.2 | 321.2 | 229.2 | 163.6 | 86.3 | 62.0 | 44.0 | 31.7 | 23.3 | 16.7 | 11.9 | 8.6 | 6.1 | 4.5 | 3.2 | 2.3 | 1.6 | 1.2 | ||
|
Rated torque momentum nominale (N.M) |
0.016 | 0.023 | 0.050 | 0.071 | 0.099 | 0.160 | 0.222 | 0.313 | 0.435 | 0.503 | 0.703 | 0.982 | 1.363 | 1.919 | 2.211 | 3.093 | 4.324 | 6.046 | 7.500 | ||
|
Rated torque momentum nominale (KG.CM) |
0.16 | 0.22 | 0.49 | 0.69 | 0.97 | 1.57 | 2.18 | 3.07 | 4.27 | 4.93 | 6.89 | 9.63 | 13.36 | 18.81 | 21.67 | 30.32 | 42.38 | 59.26 | 73.50 | ||
|
Rated torque momentum nominale (LB.IN) |
0.18 | 0.25 | 0.57 | 0.80 | 1.12 | 1.80 | 2.51 | 3.54 | 4.92 | 5.68 | 7.94 | 11.09 | 15.39 | 21.67 | 24.96 | 34.93 | 48.83 | 68.27 | 84.68 | ||
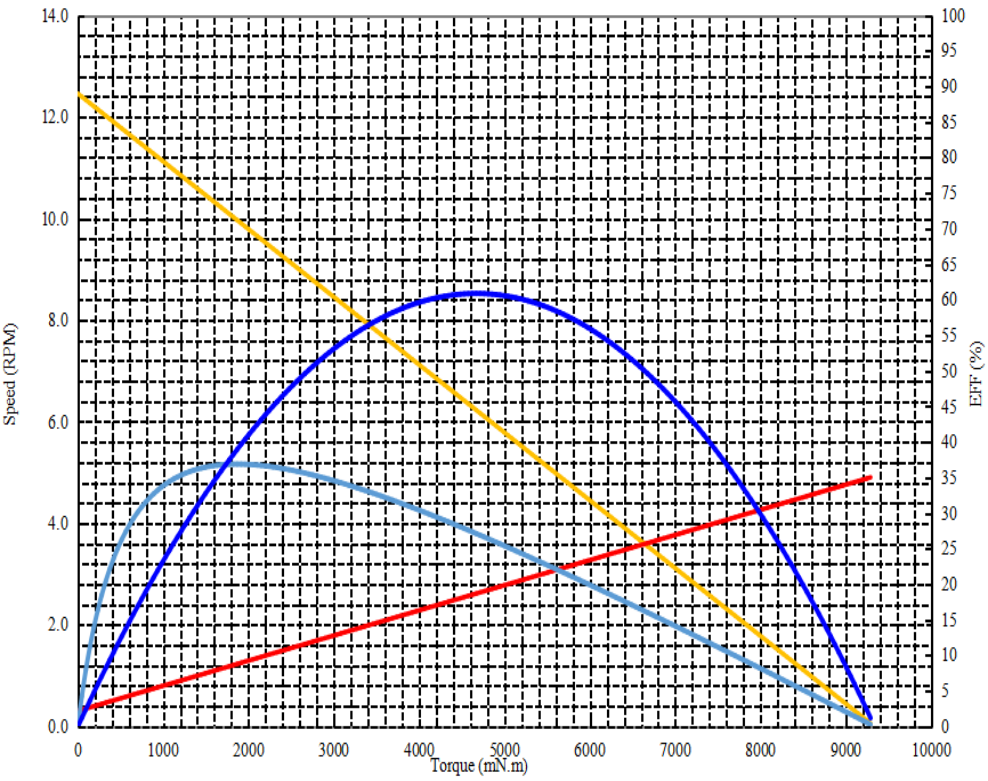
| Motor rotulae curvatae exemplum motoris decelerationis curvae | |||||||||||||||||||||
| Proiectum nomen operis : | DC Apparatus Motor | Dies data : | 2025/3/26 | Perfomantia (in temperatura ambientali 25-30 ℃) | |||||||||||||||||
| Velocitas motoris velocitas rotationis : | 4600RPM | Scala integra ambitus mensurae : | 100% | Eff | Rapidum testare ad praeventionem incrementi caloris et damni supercargi. | ||||||||||||||||
| Catena rotatoria gradus : | 4 | 5.0 | Watts | Voltage constans carga voltage constantis : | 12 | Voltae | |||||||||||||||
| Rationis dentium ratio reductionis : | 369 | 5.0 | Amp. | Directio directio : | CW\/CCW | ||||||||||||||||
 |
|||||||||||||||||||||
| Torques momentum : | 4667.3 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 6.2 | Rpm | |||||||||||||||||||
| Current currens : | 0.93 | Amperes | |||||||||||||||||||
| Productio Combinatio alia accessoria | |||||||||||||||||||||
| Accesoria nomen | Voltage voltage | Resolutio resolutio | Canalis numerus | Animadverte | |||||||||||||||||
| Magnetic Encoder magneticus encoder | 5V-24V | 12ppr | A&B | ||||||||||||||||||
Cassettum Planetarium Onus Magnum 32 mm | TJX32RL | Momenti Torquendi Exeuntis 25 Nm
1. Cassettum planetarium 32 mm, suffīxum RL cum renūtītā parte exeuntis
2. Momentum torquendi exeuntis usque ad 25 Nm, momentum torquendi maximum 40 Nm
3. Magnae axis exeuntis ad onera radialia et axiale magna
4. Rationes reductiōnis 5–300:1
TJX32RL est cassettum planetarium onus magnum 32 mm quod momenti torquendi continuī 25 Nm praebere potest. Pars exeuntis magnos dentes planetarios et magni diametri axis exeuntis utitur, qui ab angularibus contactibus duplicibus sustentatur. Momentum torquendi maximum ad 40 Nm pervenit. Rationes reductiōnis a 5:1 ad 300:1. Iactus retrogradus minor quam 1°. Idoneum ad applicationes gravissimas ubi spatium angustum est.
Diamēter 32 mm, momentum torquendi 15–25 Nm, maximum 40 Nm, rationes 5–300:1, onus radiale usque ad 200 N.
1. Tractiones sēdēs rotātōriae electricae
2. Bracchia robotica gravissima
3. Operātōrēs ianuārum glissandī automātīcae
4. Tabulae elevatrices industriales
1. Alta densitas momenti torsionis: 25 Nm in pachy 32 mm.
2. Robusta vecturae exirentes: Sustinent graves onus lateralia.
3. Facultas momenti torsionis maximalis: 40 Nm pro oneribus intermittere.








TJX38RGa

TJP103FT

TJP33RL

TH31S

