
Links Celeres






| Dc Planetaria Apparatus Motor directus motor planetarius | 5 Nm | 2 Watti | |||||||||||||||||||
| RF280 Micro pensilis motor cum dentato reductione | Ad combinationem cum | ||||||||||||||||||||
| Hall sensor encoder | |||||||||||||||||||||
| possibilitate conjunctionis cum magnetic encoder | |||||||||||||||||||||
| TJX24RD Series | |||||||||||||||||||||
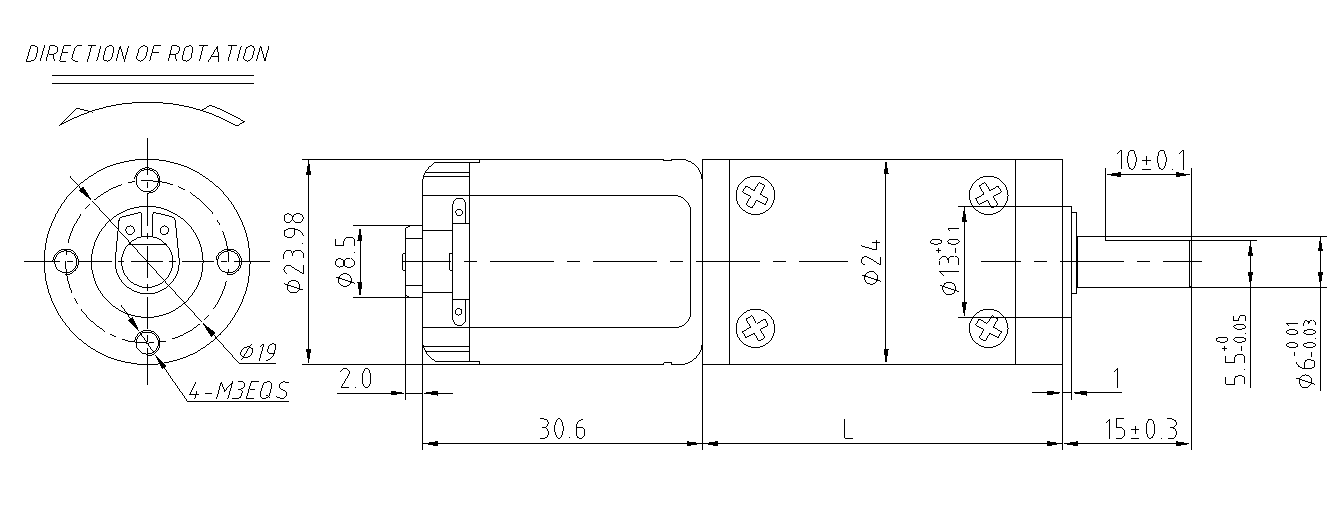
| Delineatio Dimensionalis figūra dīmēnsiōnis (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Imāgō mōtoris imago actualis motoris | |||||||||||||||||||||
 | |||||||||||||||||||||
| Caracteristici motoris caracteres motoris | |||||||||||||||||||||
| Material Domus materies faciei installationis | Aluminium Alloy aluminium confectio | ||||||||||||||||||||
| Materies catenae rotulae materies rotae dentatae | Ferrum ferrum | ||||||||||||||||||||
| Recessus retro intervalum dentis rotae | ≤2° | ||||||||||||||||||||
| Fulcra in arbores egressus fulcra in arbores egressus | Rotula Globi fulcrum globum | ||||||||||||||||||||
| Velocitas maxima input recommendata velocitas input maxima suggestenda | ≤15000RPM | ||||||||||||||||||||
| Vis radialis vis radialis | ≤2.5kgf | ||||||||||||||||||||
| Axial force vis axialis | ≤1kgf | ||||||||||||||||||||
| Máxima vis pressão no eixo máxima vis pressão suportada pelo eixo | ≤7kgf | ||||||||||||||||||||
| Cavum radiale interstitium radiale | ≤0.05mm | ||||||||||||||||||||
| Interstitium axiale interstitium axiale | ≤0.3mm | ||||||||||||||||||||
| Ambitus Temperatura operandi intervalum temperaturae usus | -20℃-120℃ | ||||||||||||||||||||
| Commutator structura conversionis | Purificatus | ||||||||||||||||||||
| Directio rotationis directio rotationis | CW / CCW | ||||||||||||||||||||
| Sonitus sonus | ≤40dB | ||||||||||||||||||||
| Data Technica Motoris DC parametri motoris directi currentis | |||||||||||||||||||||
| Valores ad 25-30 ℃ numeri mensurati sub temperaturae camerae | |||||||||||||||||||||
|
Formam typus |
Voltage aestimatum (V ) tensio nominalis |
Sine Onere parametri sine onere |
Ratum parametri nominales |
Stall parametri bloccati |
*Suggesio: Tabula datasheet in latere sinistro est limitata, quaesita nostra personnel pro magis informationibus parametricis. monitio: Tabula databus in latere sinistro parum habet, conlatus esto ad servitorem curae pro pluribus informatiis parametrorum. |
||||||||||||||||
|
Celeritas velocitas rotationis |
Current currens |
Celeritas velocitas rotationis |
Current currens |
Torques torques |
Productio potentia exitus |
Eff efficietia |
Torques torques |
Current currens |
|||||||||||||
| rpm | ma | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RF280 | 12 | 6800 | 30 | 5440 | 0.10 | 1.30 | 0.74 | 64.96 | 3.90 | 0.60 | |||||||||||
| RF280 | 24 | 6800 | 14 | 5440 | 0.05 | 1.35 | 0.77 | 63.87 | 4.05 | 0.35 | |||||||||||
| Motor cum Gearbox Data Technica parametri motoris reductorii | |||||||||||||||||||||
| Data caambi parametri caambi | |||||||||||||||||||||
|
Rationis dentium ratio reductionis n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Numerus stadium dentium numerus stadium reductionis |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Longitudo cistae rotarum dentatarum longitudo cistae rotarum (mm) |
22.4 | 22.4 | 27.6 | 27.6 | 27.6 | 32.8 | 32.8 | 32.8 | 32.8 | 39 | 39 | 39 | 39 | 39 | 45.2 | 45.2 | 45.2 | 45.2 | 45.2 | ||
|
Efficientia efficietia (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RF280-12V-6800R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1837.8 | 1307.7 | 496.4 | 354.2 | 252.8 | 133.3 | 95.8 | 68.0 | 48.9 | 36.0 | 25.8 | 18.4 | 13.3 | 9.4 | 7.0 | 5.0 | 3.6 | 2.5 | 1.9 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1470.3 | 1046.2 | 397.1 | 283.3 | 202.2 | 106.7 | 76.6 | 54.4 | 39.1 | 28.8 | 20.6 | 14.7 | 10.6 | 7.5 | 5.6 | 4.0 | 2.8 | 2.0 | 1.5 | ||
|
Rated torque momentum nominale (N.M) |
0.004 | 0.006 | 0.013 | 0.018 | 0.025 | 0.041 | 0.057 | 0.080 | 0.111 | 0.128 | 0.179 | 0.250 | 0.347 | 0.489 | 0.564 | 0.789 | 1.102 | 1.541 | 2.099 | ||
|
Rated torque momentum nominale (KG.CM) |
0.04 | 0.06 | 0.13 | 0.18 | 0.25 | 0.40 | 0.56 | 0.78 | 1.09 | 1.26 | 1.76 | 2.45 | 3.40 | 4.79 | 5.52 | 7.73 | 10.80 | 15.10 | 20.57 | ||
|
Rated torque momentum nominale (LB.IN) |
0.05 | 0.06 | 0.15 | 0.20 | 0.29 | 0.46 | 0.64 | 0.90 | 1.25 | 1.45 | 2.02 | 2.83 | 3.92 | 5.52 | 6.36 | 8.90 | 12.45 | 17.40 | 23.70 | ||
| RF280-24V-6800R | |||||||||||||||||||||
|
Velocitas sine onere velocitas in vacuo (rpm) |
1837.8 | 1307.7 | 496.4 | 354.2 | 252.8 | 133.3 | 95.8 | 68.0 | 48.9 | 36.0 | 25.8 | 18.4 | 13.3 | 9.4 | 7.0 | 5.0 | 3.6 | 2.5 | 1.9 | ||
|
Celeritas Aestimata velocitas nominalis (rpm) |
1470.3 | 1046.2 | 397.1 | 283.3 | 202.2 | 106.7 | 76.6 | 54.4 | 39.1 | 28.8 | 20.6 | 14.7 | 10.6 | 7.5 | 5.6 | 4.0 | 2.8 | 2.0 | 1.5 | ||
|
Rated torque momentum nominale (N.M) |
0.004 | 0.006 | 0.013 | 0.019 | 0.026 | 0.042 | 0.059 | 0.083 | 0.115 | 0.133 | 0.186 | 0.260 | 0.361 | 0.508 | 0.585 | 0.819 | 1.145 | 1.601 | 2.180 | ||
|
Rated torque momentum nominale (KG.CM) |
0.04 | 0.06 | 0.13 | 0.18 | 0.26 | 0.41 | 0.58 | 0.81 | 1.13 | 1.31 | 1.82 | 2.55 | 3.54 | 4.98 | 5.74 | 8.02 | 11.22 | 15.69 | 21.36 | ||
|
Rated torque momentum nominale (LB.IN) |
0.05 | 0.07 | 0.15 | 0.21 | 0.30 | 0.48 | 0.66 | 0.94 | 1.30 | 1.50 | 2.10 | 2.94 | 4.07 | 5.74 | 6.61 | 9.25 | 12.92 | 18.07 | 24.61 | ||
| Motor rotulae curvatae exemplum motoris decelerationis curvae | |||||||||||||||||||||
| Proiectum nomen operis : | DC Apparatus Motor | Dies data : | 2025/3/26 | Perfomantia (in temperatura ambientali 25-30 ℃) | |||||||||||||||||
| Velocitas motoris velocitas rotationis : | 6800RPM | Scala integra ambitus mensurae : | 100% | Eff | Rapidum testare ad praeventionem incrementi caloris et damni supercargi. | ||||||||||||||||
| Catena rotatoria gradus : | 3 | 1.0 | Watts | Voltage constans carga voltage constantis : | 12 | Voltae | |||||||||||||||
| Rationis dentium ratio reductionis : | 100 | 1.0 | Amp. | Directio directio : | CW\/CCW | ||||||||||||||||
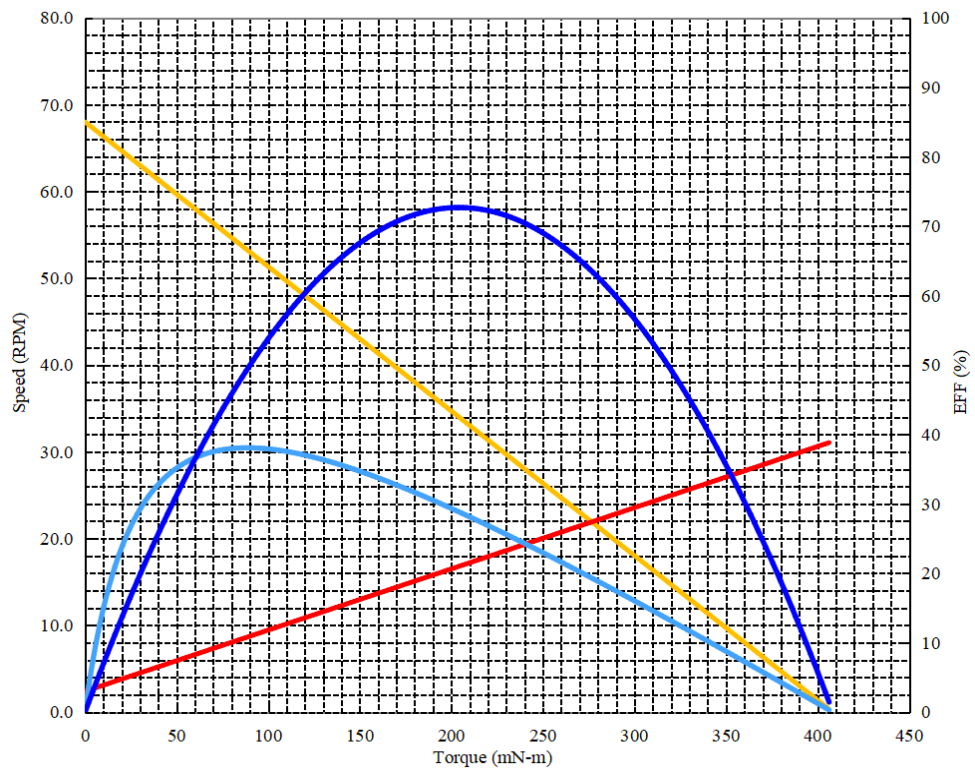 |
Absque onere parametri sine onere | ||||||||||||||||||||
| Celeritas velocitas rotationis : | 68.0 | Rpm | |||||||||||||||||||
| Current currens : | 0.030 | Amperes | |||||||||||||||||||
| Maximi parametri instantanei parametri maximi instantanei | |||||||||||||||||||||
| Torques momentum : | 400.8 | mN-m | |||||||||||||||||||
| Current currens : | 0.390 | Amperes | |||||||||||||||||||
| Ad maximam efficientiam parametri puncti maximae efficientiae | |||||||||||||||||||||
| Efficientia efficietia : | 38.1 | % | |||||||||||||||||||
| Torques momentum : | 88.64 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 53.2 | Rpm | |||||||||||||||||||
| Current currens : | 0.108 | Amperes | |||||||||||||||||||
| Productio potentia egressus : | 0.49 | Watts | |||||||||||||||||||
| Ad maximam potentiam egressus maximi output parametri | |||||||||||||||||||||
| Productio potentia egressus : | 0.727 | Watts | |||||||||||||||||||
| Torques momentum : | 204.1 | mN-m | |||||||||||||||||||
| Celeritas velocitas rotationis : | 34.0 | Rpm | |||||||||||||||||||
| Current currens : | 0.21 | Amperes | |||||||||||||||||||
| Productio Combinatio alia accessoria | |||||||||||||||||||||
| Accesoria nomen | Voltage voltage | Resolutio resolutio | Canalis numerus | Animadverte | |||||||||||||||||
| Magnetic Encoder magneticus encoder | 3V-12V | 3ppr, 6ppr | A&B | ||||||||||||||||||
Cassette Planetaria Parvae Ludificationis | TJX24RD | Ludificatio <0,5° ad Praecisionem
1. Cassette planetaria 24 mm, suffigium RD cum denticulis praecise politis
2. Ludificatio ≤0,5° (normalis ≤1,5°), momentum torquens in exitu usque ad 4 Nm
3. Ferulae planetariae praeloadae et dentes rotarum coniuncti
4. Optima ad applicationes positionis quae magnam repetibilitatem postulant
TJX24RD est cassette planetaria gradus praecisionis 24 mm cuius ludificatio ad <0,5° est minuta. Hoc efficitur per series denticulorum coniunctas, ferulas praeloatas et machinationem altissimae praecisionis corporis. Momentum torquens in exitu attingit 4 Nm. Rationes reductae a 4:1 ad 100:1. Cassette cum motoribus passuum vel servomotoribus coniungi potest ad munera positionis exigentia.
Diameter 24 mm, ludificatio <0,5°, rationes 4–100:1, momentum torquens usque ad 4 Nm.
- Positiones articulorum roboticorum
- Robotae chirurgici medici
- Systemata optica deprehensionis
- Tabulae rotatoriae CNC
1. Ultra-parvus retrocursus: <0,5° pro alta praecisione.
2. Alta rigiditas torsionis: designatio praeincumbens.
3. Repetibilis positio: idonea pro systematibus passuum apertis.








TJX22RC

TJP50RG

TJP37FQ

TJP37RH

