





| DC 행성용 기어 모터 직류 행성 기어 모터 | 7.5 Nm | 25 Watts | |||||||||||||||||||
| RS565 마이크로 유선 DC 모터 with 행성 기어박스 | 조합용 | ||||||||||||||||||||
| 홀 센서 인코더 | |||||||||||||||||||||
| 자기 인코더와 함께 사용 가능 | |||||||||||||||||||||
| TJX36RGd 시리즈 | |||||||||||||||||||||
| 규격 도면 외형 치수도 (mm) | |||||||||||||||||||||
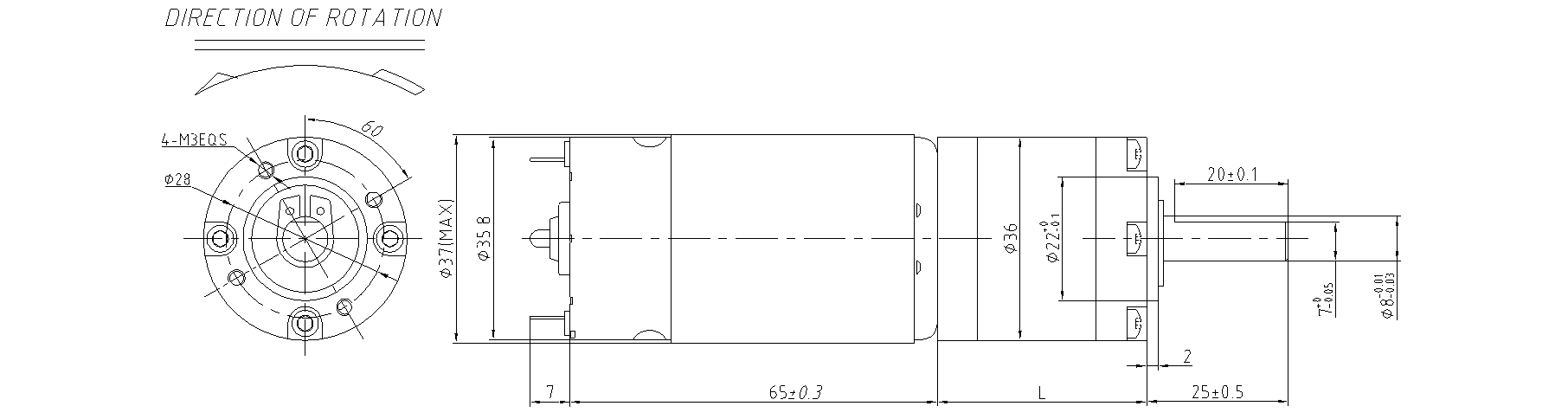 | |||||||||||||||||||||
| 모터 사진 모터 실물 사진 | |||||||||||||||||||||
 | |||||||||||||||||||||
| 모터 특성 모터 특성 | |||||||||||||||||||||
| 외장 재질 설치 면 재질 | 금속 합금 亜연 합금 | ||||||||||||||||||||
| 기어 체인 재질 기어 재질 | 강철 & 분말 메탈러지 분말 메탈러지, 강철-tooth | ||||||||||||||||||||
| 백래시 기어 백래시 | ≤2° | ||||||||||||||||||||
| 출력 샤프트 베어링 출력축 베어링 | 볼 베어링 구형 베어링 | ||||||||||||||||||||
| 권장 최대 입력 속도 권장 최대 입력 속도 | ≤10000RPM | ||||||||||||||||||||
| 방사력 방사력 | ≤8kgf | ||||||||||||||||||||
| 추력 축 방향 힘 | ≤3kgf | ||||||||||||||||||||
| 주축에 대한 최대 압력 주축 최대 용인 압입력 | ≤15kgf | ||||||||||||||||||||
| 반경 방향 간격 방사형 간격 | ≤0.1mm | ||||||||||||||||||||
| 축 방향 간격 축 방향 간격 | ≤0.4mm | ||||||||||||||||||||
| 작동 온도 범위 사용 온도 범위 | -20℃-120℃ | ||||||||||||||||||||
| コミュ트러 스위칭 구조 | 빗 | ||||||||||||||||||||
| 회전 방향 회전 방향 | CW / CCW | ||||||||||||||||||||
| 소음 소음 | ≤60dB | ||||||||||||||||||||
| DC 모터 기술 사양 직류 모터 매개변수 | |||||||||||||||||||||
| 25-30에서의 값 ℃ 실온에서 측정된 수치 | |||||||||||||||||||||
|
모델 모델 |
정량 전압 (V ) 레이팅 전압 |
공회전 공회전 파라미터 |
정격 정격 파라미터 |
스탈 차단 파라미터 |
*Tips: 왼쪽의 데이터시트는 제한되어 있습니다. 더 많은 파라미터 정보를 위해 고객 서비스에 문의하십시오. 팁: 왼쪽 데이터 표의 매개변수는 제한적이므로 더 자세한 매개변수 정보를 원하시면 고객 서비스로 연락하십시오. |
||||||||||||||||
|
속도 회전 수 |
현재 전류 |
속도 회전 수 |
현재 전류 |
토크 토크 |
출력 출력 공 |
효율 효율 |
토크 토크 |
현재 전류 |
|||||||||||||
| rpm | mA | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RS565 | 10.5 | 8000 | 702 | 6400 | 2.70 | 27.69 | 18.56 | 65.38 | 83.07 | 19.80 | |||||||||||
| RS565 | 24 | 8000 | 290 | 6400 | 1.29 | 30.40 | 20.37 | 66.06 | 91.20 | 10.20 | |||||||||||
| 기어박스가 있는 모터 기술 사양 감속 모터 사양 | |||||||||||||||||||||
| 기어박스 데이터 감속기 파라미터 | |||||||||||||||||||||
|
기어 비율 감속비 n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
기어 단계 수 감속 단계 |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
기어박스 길이 기어 박스 길이 (mm) |
28.2 | 28.2 | 37 | 37 | 37 | 45.8 | 45.8 | 45.8 | 45.8 | 54.7 | 54.7 | 54.7 | 54.7 | 54.7 | 64 | 64 | 64 | 64 | 64 | ||
|
효율성 효율 (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RS565-10.5V-8000R | |||||||||||||||||||||
|
무부하 속도는 공회전 속도 (rpm) |
2162.2 | 1538.5 | 583.9 | 416.7 | 297.4 | 156.9 | 112.7 | 80.0 | 57.6 | 42.3 | 30.3 | 21.7 | 15.6 | 11.1 | 8.2 | 5.9 | 4.2 | 3.0 | 2.2 | ||
|
정격 속도 정격 속도 (rpm) |
1729.7 | 1230.8 | 467.2 | 333.3 | 237.9 | 125.5 | 90.1 | 64.0 | 46.0 | 33.9 | 24.2 | 17.3 | 12.5 | 8.9 | 6.6 | 4.7 | 3.3 | 2.4 | 1.8 | ||
|
정격 토크 정격 토크 (N.m) |
0.087 | 0.122 | 0.274 | 0.384 | 0.538 | 0.867 | 1.207 | 1.701 | 2.364 | 2.732 | 3.816 | 5.334 | 7.401 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
정격 토크 정격 토크 (KG.CM) |
0.85 | 1.20 | 2.69 | 3.76 | 5.27 | 8.50 | 11.83 | 16.67 | 23.16 | 26.77 | 37.40 | 52.27 | 72.53 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
정격 토크 정격 토크 (LB.IN) |
0.98 | 1.38 | 3.09 | 4.34 | 6.08 | 9.79 | 13.63 | 19.20 | 26.69 | 30.85 | 43.09 | 60.22 | 83.56 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
| RS565-24V-8000R | |||||||||||||||||||||
|
무부하 속도는 공회전 속도 (rpm) |
2162.2 | 1538.5 | 583.9 | 416.7 | 297.4 | 156.9 | 112.7 | 80.0 | 57.6 | 42.3 | 30.3 | 21.7 | 15.6 | 11.1 | 8.2 | 5.9 | 4.2 | 3.0 | 2.2 | ||
|
정격 속도 정격 속도 (rpm) |
1729.7 | 1230.8 | 467.2 | 333.3 | 237.9 | 125.5 | 90.1 | 64.0 | 46.0 | 33.9 | 24.2 | 17.3 | 12.5 | 8.9 | 6.6 | 4.7 | 3.3 | 2.4 | 1.8 | ||
|
정격 토크 정격 토크 (N.m) |
0.096 | 0.134 | 0.301 | 0.422 | 0.591 | 0.952 | 1.326 | 1.867 | 2.595 | 2.999 | 4.189 | 5.856 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
정격 토크 정격 토크 (KG.CM) |
0.94 | 1.32 | 2.95 | 4.13 | 5.79 | 9.33 | 12.99 | 18.30 | 25.43 | 29.39 | 41.06 | 57.39 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
정격 토크 정격 토크 (LB.IN) |
1.08 | 1.52 | 3.40 | 4.76 | 6.67 | 10.75 | 14.97 | 21.08 | 29.30 | 33.86 | 47.30 | 66.12 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
| 기어 모터 곡선 케이스 감속 모터 곡선 예시 | |||||||||||||||||||||
| 프로젝트 공정명 : | DC 변속기 모터 | 대추 날짜 : | 2025/3/26 | 성능 (주변 온도 25-30℃ 내에서) ℃) | |||||||||||||||||
| 모터 속도 회전 수 : | 8000RPM | 풀 스케일 측정 범위 : | 100% | 효율 | 온도 상승과 과부하 손상을 방지하기 위해 신속히 테스트하십시오. | ||||||||||||||||
| 기어 체인 단계 수 : | 1 | 50.0 | 와트 | 일정한 전압 상압 로드 : | 10.5 | 볼트 | |||||||||||||||
| 기어 비율 감속비 : | 5.2 | 20.0 | 암페어 | 방향 방향 : | CW/CCW | ||||||||||||||||
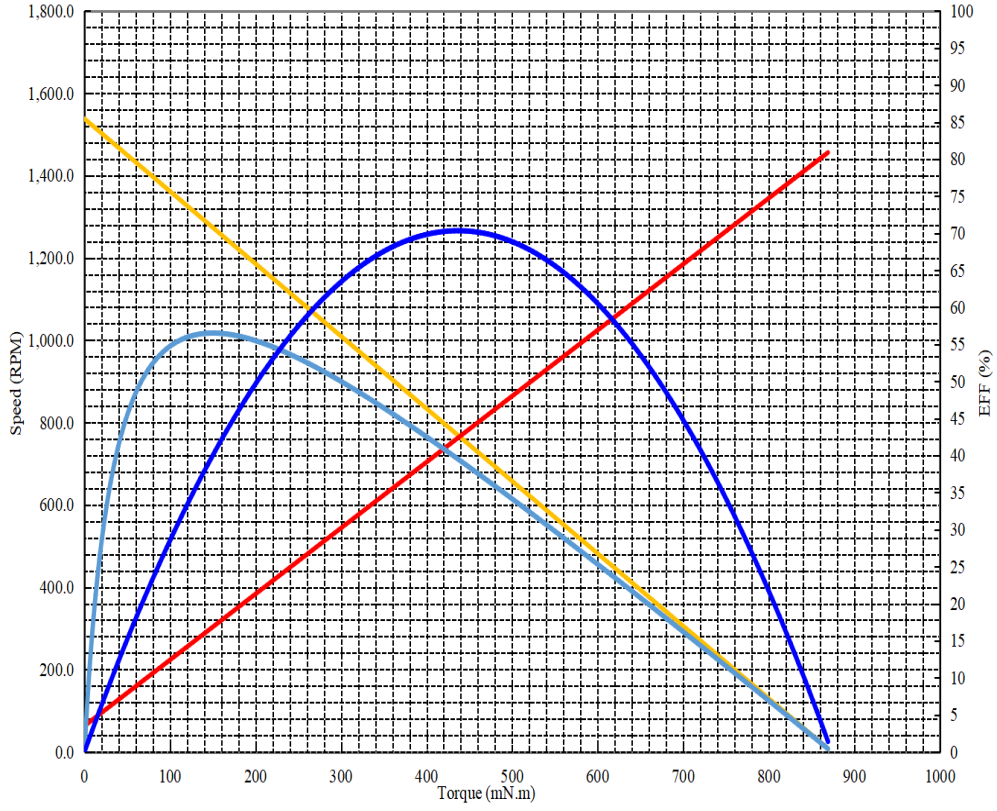 |
공회전 시 공회전 파라미터 | ||||||||||||||||||||
| 속도 회전 수 : | 1538.0 | Rpm | |||||||||||||||||||
| 현재 전류 : | 0.70 | 암퍼 | |||||||||||||||||||
| 최대 순간적 매개변수 최대 순간 매개변수 | |||||||||||||||||||||
| 토크 토크 : | 856.42 | mN-m | |||||||||||||||||||
| 현재 전류 : | 16.26 | 암퍼 | |||||||||||||||||||
| 최대 효율 시 최고 효율점 파라미터 | |||||||||||||||||||||
| 효율성 효율 : | 56.5 | % | |||||||||||||||||||
| 토크 토크 : | 150.1 | mN-m | |||||||||||||||||||
| 속도 회전 수 : | 1273.7 | Rpm | |||||||||||||||||||
| 현재 전류 : | 3.37 | 암퍼 | |||||||||||||||||||
| 출력 출력 전력 : | 20.02 | 와트 | |||||||||||||||||||
| 최대 출력 시 최대 전력 출력 파라미터 | |||||||||||||||||||||
| 출력 출력 전력 : | 35.167 | 와트 | |||||||||||||||||||
| 토크 토크 : | 436.7 | mN-m | |||||||||||||||||||
| 속도 회전 수 : | 769.0 | Rpm | |||||||||||||||||||
| 현재 전류 : | 8.48 | 암퍼 | |||||||||||||||||||
| 생산 조합 기타 액세서리 | |||||||||||||||||||||
| 악세사리 이름 | 전압 전압 | 해상도 해상도 | 채널 수 | 비고 | |||||||||||||||||
| 자기 인코더 자기 코드러 | 5V-24V | 12ppr | A&B | ||||||||||||||||||
이중 출력 샤프트 36mm 행성 기어박스 | TJX36RGd | 투과형 샤프트 설계
1. 이중 출력 샤프트(RGd 접미사)를 갖춘 36mm 행성 기어박스
2. 최대 출력 토크 28 Nm, 감속비 5–200:1
3. 중공 투과형 샤프트 옵션(내경 최대 8mm)
4. 중심부를 통한 배선 또는 유체 통로 가능
TJX36RGd는 양단이 개방된 중공 출력 샤프트를 특징으로 합니다. 중공 보어(최대 8mm 지름)를 통해 케이블, 공기 호스 또는 유체 튜브를 기어박스 중심부를 관통시킬 수 있습니다. 출력 토크는 28 Nm이며, 감속비는 5:1에서 200:1까지입니다. 백래시는 1° 미만입니다. 본 기어박스는 36mm 모터와 호환됩니다.
지름 36mm, 중공 샤프트 내경 6–8mm, 토크 28 Nm, 감속비 5–200:1.
- 협동 로봇 조인트
- 회전 메커니즘 내 케이블 관리
- 의료용 내시경 회전 장치
- 공압/유압 라인용 로터리 유니온
1. 중공 샤프트: 전선 또는 유체를 통과시킬 수 있음.
2. 이중 출력: 양쪽 끝에서 부하를 구동함.
3. 컴팩트한 통합: 외부 케이블 관리가 필요 없음.








TJX42RT

TJZ37FGa

TJP37F3650BL

TJP37FG

