





| DC 행성용 기어 모터 직류 행성 기어 모터 | 2 Nm | 4 Watts | |||||||||||||||||||
| 180 마이크로 유선 dc 모터 및 행성 기어박스 | 조합용 | ||||||||||||||||||||
| 홀 센서 인코더 | |||||||||||||||||||||
| 자기 인코더와 함께 사용 가능 | |||||||||||||||||||||
| TJX22RC Series | |||||||||||||||||||||
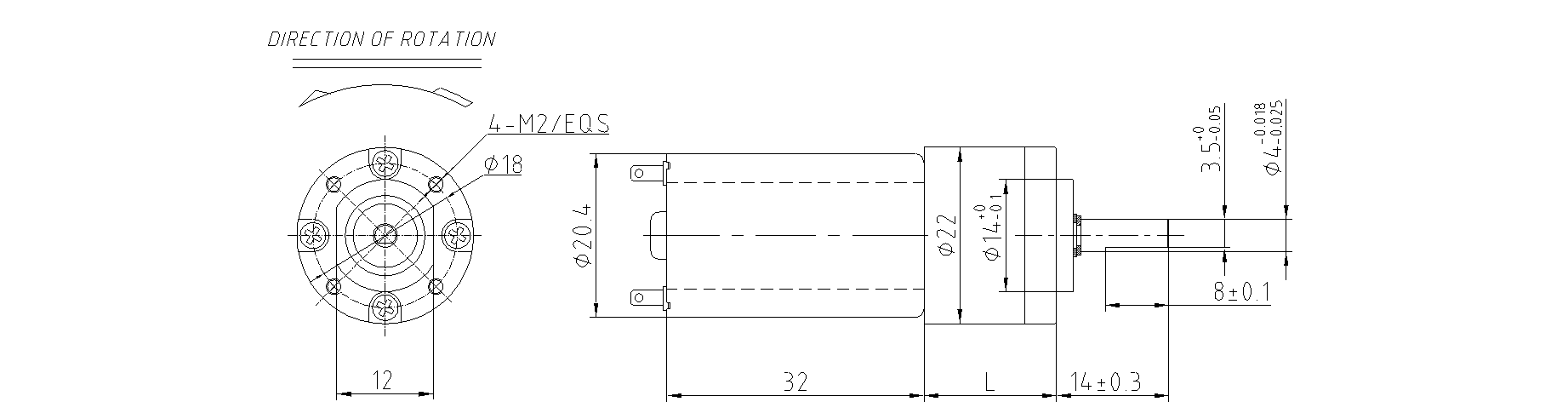
| 규격 도면 외형 치수도 (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| 모터 사진 모터 실물 사진 | |||||||||||||||||||||
 | |||||||||||||||||||||
| 모터 특성 모터 특성 | |||||||||||||||||||||
| 외장 재질 설치 면 재질 | 금속 합금 亜연 합금 | ||||||||||||||||||||
| 기어 체인 재질 기어 재질 | 분말 금속학 분말 연금속 | ||||||||||||||||||||
| 백래시 기어 백래시 | ≤2° | ||||||||||||||||||||
| 출력 샤프트 베어링 출력축 베어링 | 오일 베어링 윤활유 베어링 | ||||||||||||||||||||
| 권장 최대 입력 속도 권장 최대 입력 속도 | ≤15000RPM | ||||||||||||||||||||
| 방사력 방사력 | ≤1kgf | ||||||||||||||||||||
| 추력 축 방향 힘 | ≤0.6kgf | ||||||||||||||||||||
| 주축에 대한 최대 압력 주축 최대 용인 압입력 | ≤5kgf | ||||||||||||||||||||
| 반경 방향 간격 방사형 간격 | ≤0.05mm | ||||||||||||||||||||
| 축 방향 간격 축 방향 간격 | ≤0.3mm | ||||||||||||||||||||
| 작동 온도 범위 사용 온도 범위 | -20℃-120℃ | ||||||||||||||||||||
| コミュ트러 스위칭 구조 | 빗 | ||||||||||||||||||||
| 회전 방향 회전 방향 | CW / CCW | ||||||||||||||||||||
| 소음 소음 | ≤40dB | ||||||||||||||||||||
| DC 모터 기술 사양 직류 모터 매개변수 | |||||||||||||||||||||
| 25-30에서의 값 ℃ 실온에서 측정된 수치 | |||||||||||||||||||||
|
모델 모델 |
정량 전압 (V ) 레이팅 전압 |
공회전 공회전 파라미터 |
정격 정격 파라미터 |
스탈 차단 파라미터 |
*Tips: 왼쪽의 데이터시트는 제한되어 있습니다. 더 많은 파라미터 정보를 위해 고객 서비스에 문의하십시오. 팁: 왼쪽 데이터 표의 매개변수는 제한적이므로 더 자세한 매개변수 정보를 원하시면 고객 서비스로 연락하십시오. |
||||||||||||||||
|
속도 회전 수 |
현재 전류 |
속도 회전 수 |
현재 전류 |
토크 토크 |
출력 출력 공 |
효율 효율 |
토크 토크 |
현재 전류 |
|||||||||||||
| rpm | mA | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| 180 | 6 | 10000 | 195 | 8000 | 0.53 | 2.48 | 2.08 | 65.85 | 7.44 | 2.80 | |||||||||||
| 180 | 12 | 10000 | 103 | 8000 | 0.28 | 2.65 | 2.22 | 66.19 | 7.95 | 1.50 | |||||||||||
| 기어박스가 있는 모터 기술 사양 감속 모터 사양 | |||||||||||||||||||||
| 기어박스 데이터 감속기 파라미터 | |||||||||||||||||||||
|
기어 비율 감속비 n : 1 |
4 | 4.75 | 12.3 | 16 | 19 | 43 | 58 | 76 | 90 | 107 | 150 | 204 | 276 | 304 | 375 | 525 | 713 | 1024 | 2036 | ||
|
기어 단계 수 감속 단계 |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | ||
|
기어박스 길이 기어 박스 길이 (mm) |
13.1 | 13.1 | 16.7 | 16.7 | 16.7 | 20.3 | 20.3 | 20.3 | 20.3 | 20.3 | 23.9 | 23.9 | 23.9 | 23.9 | 23.9 | 27.5 | 27.5 | 27.5 | 27.5 | ||
|
효율성 효율 (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 180-6V-10000R | |||||||||||||||||||||
|
무부하 속도는 공회전 속도 (rpm) |
2500.0 | 2105.3 | 813.0 | 625.0 | 526.3 | 232.6 | 172.4 | 131.6 | 111.1 | 93.5 | 66.7 | 49.0 | 36.2 | 32.9 | 26.7 | 19.0 | 14.0 | 9.8 | 4.9 | ||
|
정격 속도 정격 속도 (rpm) |
2000.0 | 1684.2 | 650.4 | 500.0 | 421.1 | 186.0 | 137.9 | 105.3 | 88.9 | 74.8 | 53.3 | 39.2 | 29.0 | 26.3 | 21.3 | 15.2 | 11.2 | 7.8 | 3.9 | ||
|
정격 토크 정격 토크 (N.m) |
0.008 | 0.010 | 0.022 | 0.029 | 0.034 | 0.065 | 0.088 | 0.116 | 0.137 | 0.163 | 0.194 | 0.264 | 0.357 | 0.394 | 0.485 | 0.578 | 0.785 | 1.127 | 2.000 | ||
|
정격 토크 정격 토크 (KG.CM) |
0.08 | 0.10 | 0.22 | 0.28 | 0.33 | 0.64 | 0.87 | 1.13 | 1.34 | 1.60 | 1.90 | 2.59 | 3.50 | 3.86 | 4.76 | 5.66 | 7.69 | 11.04 | 19.60 | ||
|
정격 토크 정격 토크 (LB.IN) |
0.10 | 0.11 | 0.25 | 0.32 | 0.38 | 0.74 | 1.00 | 1.31 | 1.55 | 1.84 | 2.19 | 2.98 | 4.03 | 4.44 | 5.48 | 6.52 | 8.86 | 12.72 | 22.58 | ||
| 180-12V-10000R | |||||||||||||||||||||
|
무부하 속도는 공회전 속도 (rpm) |
2500.0 | 2105.3 | 813.0 | 625.0 | 526.3 | 232.6 | 172.4 | 131.6 | 111.1 | 93.5 | 66.7 | 49.0 | 36.2 | 32.9 | 26.7 | 19.0 | 14.0 | 9.8 | 4.9 | ||
|
정격 속도 정격 속도 (rpm) |
2000.0 | 1684.2 | 650.4 | 500.0 | 421.1 | 186.0 | 137.9 | 105.3 | 88.9 | 74.8 | 53.3 | 39.2 | 29.0 | 26.3 | 21.3 | 15.2 | 11.2 | 7.8 | 3.9 | ||
|
정격 토크 정격 토크 (N.m) |
0.009 | 0.011 | 0.024 | 0.031 | 0.036 | 0.070 | 0.094 | 0.124 | 0.146 | 0.174 | 0.207 | 0.282 | 0.382 | 0.421 | 0.519 | 0.617 | 0.838 | 1.204 | 2.000 | ||
|
정격 토크 정격 토크 (KG.CM) |
0.09 | 0.10 | 0.23 | 0.30 | 0.36 | 0.69 | 0.93 | 1.21 | 1.44 | 1.71 | 2.03 | 2.77 | 3.74 | 4.12 | 5.08 | 6.05 | 8.22 | 11.80 | 19.60 | ||
|
정격 토크 정격 토크 (LB.IN) |
0.10 | 0.12 | 0.27 | 0.35 | 0.41 | 0.79 | 1.07 | 1.40 | 1.65 | 1.97 | 2.34 | 3.19 | 4.31 | 4.75 | 5.86 | 6.97 | 9.47 | 13.59 | 22.58 | ||
| 기어 모터 곡선 케이스 감속 모터 곡선 예시 | |||||||||||||||||||||
| 프로젝트 공정명 : | DC 변속기 모터 | 대추 날짜 : | 2025/3/26 | 성능 (주변 온도 25-30℃ 내에서) ℃) | |||||||||||||||||
| 모터 속도 회전 수 : | 10000RPM | 풀 스케일 측정 범위 : | 100% | 효율 | 온도 상승과 과부하 손상을 방지하기 위해 신속히 테스트하십시오. | ||||||||||||||||
| 기어 체인 단계 수 : | 2 | 5.0 | 와트 | 일정한 전압 상압 로드 : | 6 | 볼트 | |||||||||||||||
| 기어 비율 감속비 : | 19 | 5.0 | 암페어 | 방향 방향 : | CW/CCW | ||||||||||||||||
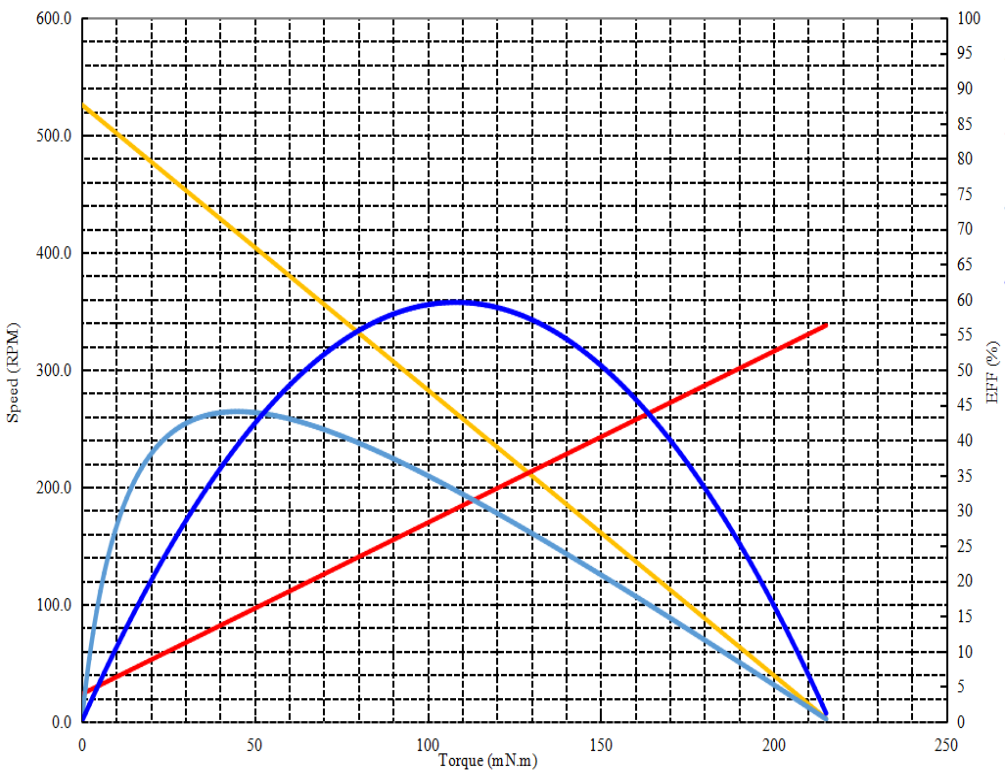 |
공회전 시 공회전 파라미터 | ||||||||||||||||||||
| 속도 회전 수 : | 526.0 | Rpm | |||||||||||||||||||
| 현재 전류 : | 0.20 | 암퍼 | |||||||||||||||||||
| 최대 순간적 매개변수 최대 순간 매개변수 | |||||||||||||||||||||
| 토크 토크 : | 211.68 | mN-m | |||||||||||||||||||
| 현재 전류 : | 2.83 | 암퍼 | |||||||||||||||||||
| 최대 효율 시 최고 효율점 파라미터 | |||||||||||||||||||||
| 효율성 효율 : | 44.0 | % | |||||||||||||||||||
| 토크 토크 : | 45.0 | mN-m | |||||||||||||||||||
| 속도 회전 수 : | 416.6 | Rpm | |||||||||||||||||||
| 현재 전류 : | 0.74 | 암퍼 | |||||||||||||||||||
| 출력 출력 전력 : | 1.96 | 와트 | |||||||||||||||||||
| 최대 출력 시 최대 전력 출력 파라미터 | |||||||||||||||||||||
| 출력 출력 전력 : | 2.978 | 와트 | |||||||||||||||||||
| 토크 토크 : | 108.1 | mN-m | |||||||||||||||||||
| 속도 회전 수 : | 263.0 | Rpm | |||||||||||||||||||
| 현재 전류 : | 1.51 | 암퍼 | |||||||||||||||||||
| 생산 조합 기타 액세서리 | |||||||||||||||||||||
| 악세사리 이름 | 전압 전압 | 해상도 해상도 | 채널 수 | 비고 | |||||||||||||||||
| 자기 인코더 자기 코드러 | 3V-12V | 3ppr, 6ppr, 12ppr | A&B | ||||||||||||||||||
직각형 콤팩트 플래네타리 기어박스 | TJX22RC | 좁은 공간을 위한 90° 출력
1. 22mm 직각형 플래네타리 기어박스, RC 접미사
2. 출력 토크 최대 2.0 Nm, 감속비 15–150:1
3. 베벨 기어 입력 단계 + 플래네타리 최종 단계
4. 좁은 모서리 설치를 위한 매우 낮은 출력 오프셋
TJX22RC는 22mm 직각형 하우징 내에 베벨 기어 입력부와 2단 플래네타리 출력부를 결합한 제품입니다. RC 설계로 최소한의 높이 증가만으로 90° 동력 전달이 가능합니다. 출력 토크는 최대 2.0 Nm에 이르며, 백래시는 <2°입니다. 이 기어박스는 22mm 크기의 모든 모터(브러시 모터, 브러시리스 모터, 스테퍼 모터)로 구동할 수 있습니다. 인라인 장착이 불가능한 응용 분야에 이상적입니다.
지름 22mm, 직각형, 감속비 15–150:1, 토크 최대 2.0 Nm, 효율 80%.
- 로봇 손목 관절
- 의료용 내시경 조작기
- 콤팩트 컨베이어 드라이브
- 자동차 미러 접기 메커니즘
1. 공간 절약형 직각 설계: 모서리에 맞춤형 설치 가능.
2. 부드러운 경사면 입력: 진동 및 소음 최소화.
3. 고효율: 행성 기어 최종 단계로 토크 유지.








TJZ17RU

TJZ25RB

TJZ42FT

TJP42FGa

