
Արագ հղումներ




 |
Տարատեսակ | Հիբրիդային քայլային շարժիչ | Ընթացիչ հաջորդականություն | |||||||||||||||||||
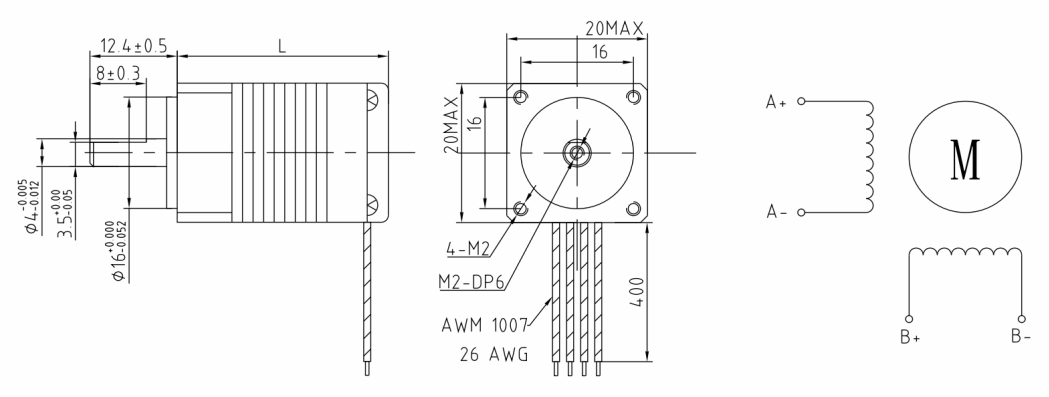
| Կցաշուրթի չափը | 20 մմ քառակուսի | |||||||||||||||||||||
| Ֆազեր | 2 | |||||||||||||||||||||
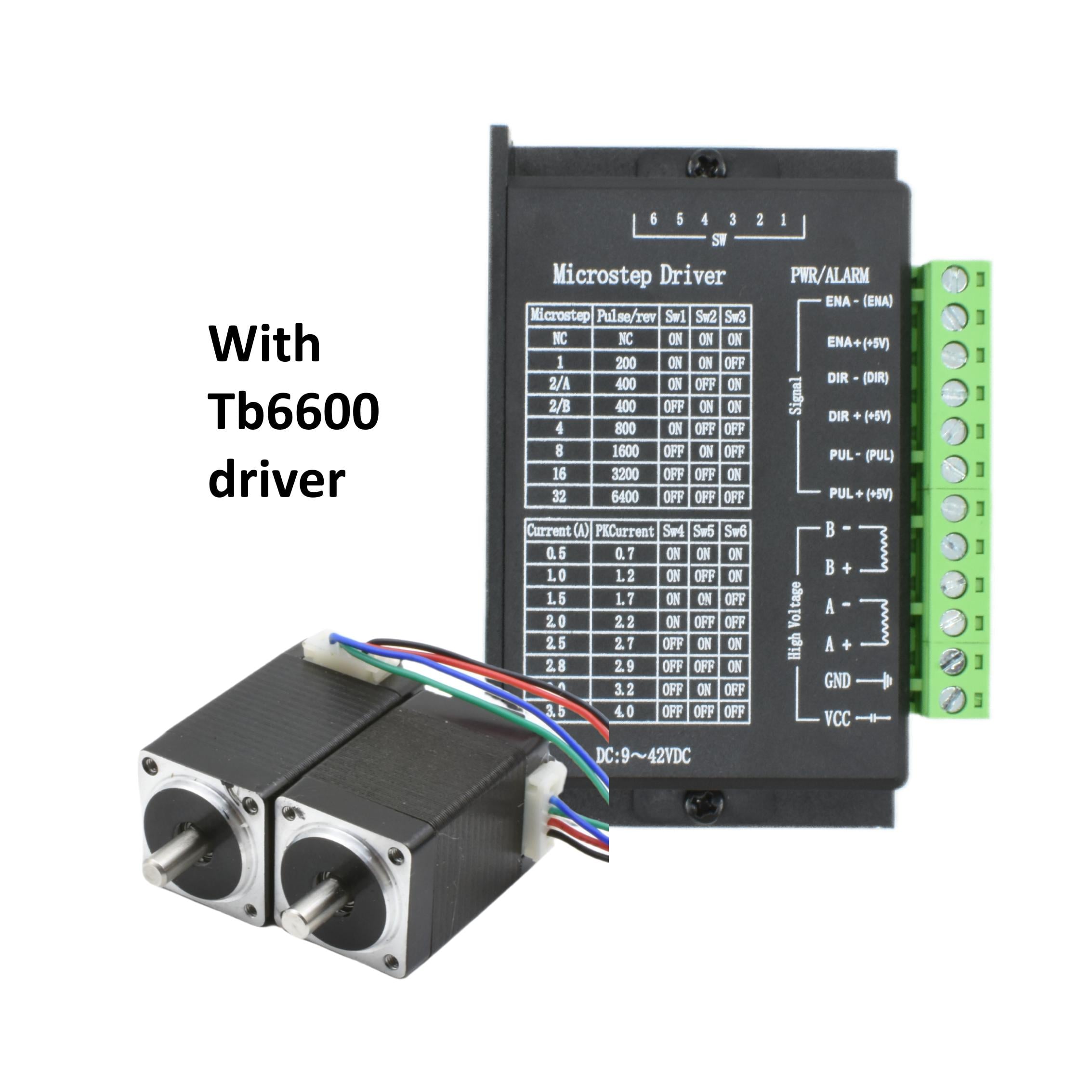
| Քայլի ճշգրտություն | ±5% | Քայլ | A+ | Բ+ | Ա- | Բ- | ||||||||||||||||
| Ռադիուսային ուժ | 18Ն(4Lbs.) վերջնական առանցքում | |||||||||||||||||||||
| IP դասակարգում | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Օպերացիոն ջերմաստիճան | -20℃մինուս 50-ից +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Բացառման դաս | Բ, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Բացառման դիմադրություն | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
| Չափսեր (մմ) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Տեխնիկական տվյալներ | ||||||||||||||||||||||
| Մոդել | Քայլի անկյուն | Մոտորի երկարությունը | Ընթացիկ | Դիմացկունություն | Հանդիպման հոդերի | Պահպանման զարկային ուժ | Դետենտ ուժ | Իներցիա | Լարեր | Քաշ | ||||||||||||
| (° ) | L(մմ) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (գ.սմ²) | (no.) | գ) | |||||||||||||
| TH2028HS-2004 | 1.8 | 28 | 0.2 | 24.0 | 8.2 | 0.014 | 0.2 | 2.5 | 4 | 50 | ||||||||||||
| TH2034HS-2004 | 1.8 | 34 | 0.2 | 25.0 | 8.4 | 0.018 | 0.3 | 3.2 | 4 | 70 | ||||||||||||
| TH2034HS-6004 | 1.8 | 34 | 0.6 | 6.5 | 1.7 | 0.018 | 0.3 | 3.2 | 4 | 70 | ||||||||||||
| TH2040HS-6004 | 1.8 | 40 | 0.6 | 5.8 | 1.6 | 0.024 | 0.5 | 4.5 | 4 | 80 | ||||||||||||
| Տորքի միավորների տեղափոխում. 1N.m≈10.2կգf.սմ≈141.6oz.դյույմ≈8.85lb.դյույմ | ||||||||||||||||||||||
| Եթե ձեզ հարկավոր են այլ պարամետրեր, խնդրում ենք կապվել գործընկերության հետ. | ||||||||||||||||||||||
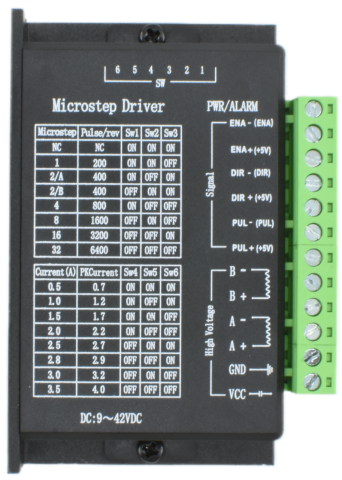
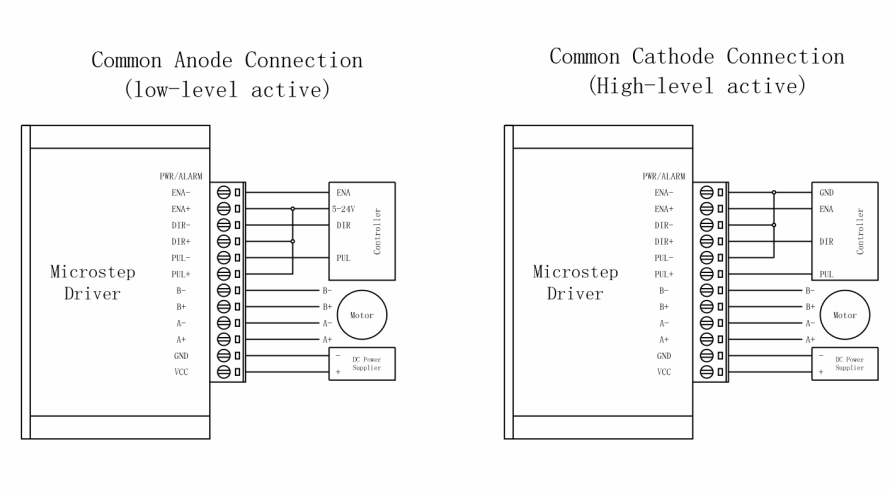
| Դրավի դիրքային կապեր | ||||||||||||||||||||||
| ||||||||||||||||||||||
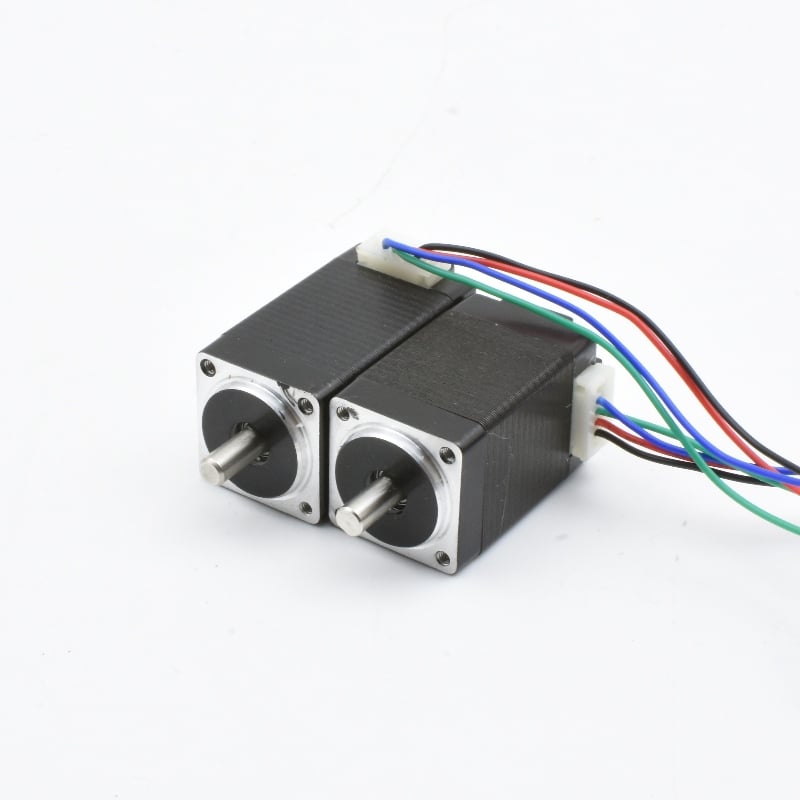
Համպակտ ճշգրտության քայլային շարժիչ | Nema8 | Ցածր վիբրացիա և բարձր դիրքավորման ճշգրտություն
1. 20 մմ շրջանակի չափս, իդեալական է արտասովոր համպակտ տարածքներում տեղադրման համար
2. Պահման մեխանիկական մոմենտը՝ մինչև 0,12 Ն·մ, քայլի անկյունը՝ 1,8°
3. Ցածր վիբրացիա և ցածր ջերմության առաջացում, հարմար է ճշգրտության պահանջվող օպտիկական և բժշկական սարքերի համար
4. Մեկ կամ երկու առանցքային տարբերակներ են հասանելի, աջակցվում է հարմարեցված միացման գծերի և միացնիչների օգտագործումը
Nema8 քայլային շարժիչը փոքր երկու փուլային հիբրիդային քայլային շարժիչ է: Ստատորը պատրաստված է բարձր մագնիսական հոսքի խտությամբ սիլիցիումային երկաթի թիթեղներից, իսկ ռոտորը սարքավորված է բարձր կատարողականության նեոդիմիումային մագնիսներով՝ փոքր ծավալում բարձր դիրքավորման ճշգրտություն ապահովելու համար: Քայլի անկյունը 1,8° է, մեկ պտույտում՝ 200 քայլ: Միկրոքայլային վարումը հնարավորություն է տալիս ապահովել ավելի հարթ շարժում և բարձր լուծում: Մենք առաջարկում ենք ընտրովի մեխանիզմներ (պլանետային կամ ուղիղ ատամնավոր), էնկոդերներ և վահանակավոր վահանակներ՝ տարբեր կիրառման պահանջներին համապատասխանելու համար:
Շրջանակի չափը՝ 20 մմ, քայլի անկյունը՝ 1.8°, պահման մեխանիկական մոմենտը՝ 0.03–0.12 Ն·մ, անվանական հոսանքը՝ 0.4–1.0 Ա, հնարավոր է հարմարեցված առանցքի երկարության և շարժիչի մեկուսացման կատարում:
- Օպտիկական ֆոկուսավորման համակարգեր
- Բժշկական միկրոպոմպեր
- Լաբորատորիայի ավտոմատացում
- CCTV տեսախցիկներ
- Փոքր 3D պրինտերներ
- Վերցնել-տեղադրել սարքեր
1. Տարածքի խնայողություն. 20 մմ չափի ուլտրակոմպակտ կառուցվածքը հնարավորություն է տալիս տեղադրել սարքը սահմանափակ տարածքներում՝ առանց կորցնելու արդյունավետությունը:
2. Ճշգրիտ դիրքավորում. 1.8° քայլի անկյունը միկրոքայլերի աջակցմամբ ապահովում է հարթ և ճշգրիտ շարժում:
3. Ցածր ջերմաստիճանի բարձրացում. Օպտիմալացված մագնիսական շղթայի դիզայնը նվազեցնում է ջերմության առաջացումը:
4. Հուսալի և մշակունակ. Բարձրորակ սայլակներն ու մեկուսացնող նյութերը երաշխավորում են երկար ծառայության ժամկետ:








TJX22RD

TJX36RGb

TJZ25RB

TJX16RU

