
Արագ հղումներ






 |
Տարատեսակ | Հիբրիդային քայլային շարժիչ | Ընթացիչ հաջորդականություն | |||||||||||||||||||
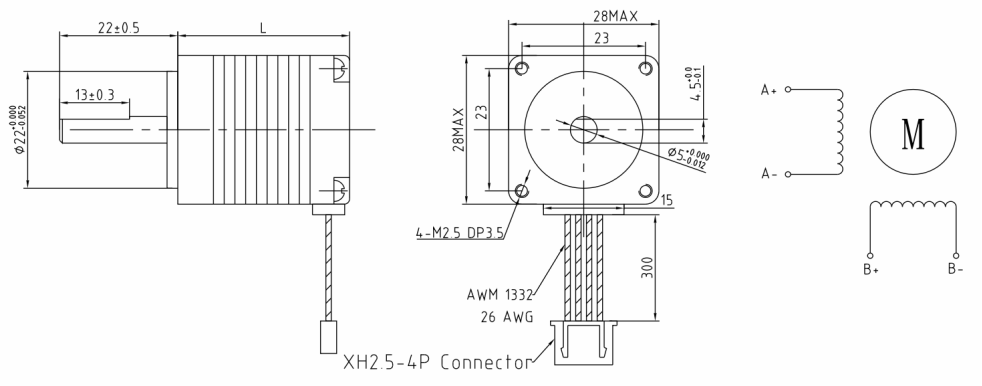
| Կցաշուրթի չափը | 28 մմ քառակուսի | |||||||||||||||||||||
| Ֆազեր | 2 | |||||||||||||||||||||
| Քայլի ճշգրտություն | ±5% | Քայլ | A+ | Բ+ | Ա- | Բ- | ||||||||||||||||
| Ռադիուսային ուժ | 30N(6.5Lbs.) ավարտական առանցքում | |||||||||||||||||||||
| IP դասակարգում | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Օպերացիոն ջերմաստիճան | -20℃մինուս 50-ից +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Բացառման դաս | Բ, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Բացառման դիմադրություն | 100 MΩ | CW | 4 | + | - | - | + | CCW | ||||||||||||||
| Չափսեր (մմ) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Տեխնիկական տվյալներ | ||||||||||||||||||||||
| Մոդել | Քայլի անկյուն | Մոտորի երկարությունը | Ընթացիկ | Դիմացկունություն | Հանդիպման հոդերի | Պահպանման զարկային ուժ | Դետենտ ուժ | Իներցիա | Լարեր | Քաշ | ||||||||||||
| (° ) | L(մմ) | (A) | (Ω) | (mH) | (N.m) | (N.cm) | (գ.սմ²) | (no.) | գ) | |||||||||||||
| TH2828HS-6004 | 1.8 | 28 | 0.60 | 4.2 | 2.2 | 0.045 | 0.3 | 6.0 | 4 | 105 | ||||||||||||
| TH2833HS-3504 | 1.8 | 33 | 0.35 | 15.0 | 9.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2833HS-6004 | 1.8 | 33 | 0.60 | 5.5 | 3.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2845HS-7004 | 1.8 | 45 | 0.70 | 7.0 | 5.0 | 0.080 | 0.6 | 11.0 | 4 | 140 | ||||||||||||
| TH2845HS-9506 | 1.8 | 45 | 0.95 | 3.4 | 1.2 | 0.060 | 0.6 | 11.0 | 6 | 140 | ||||||||||||
| TH2851HS-6004 | 1.8 | 51 | 0.60 | 9.0 | 7.2 | 0.100 | 0.8 | 13.0 | 4 | 180 | ||||||||||||
| TH2851HS-9306 | 1.8 | 51 | 0.93 | 4.6 | 1.8 | 0.080 | 0.8 | 13.0 | 6 | 180 | ||||||||||||
| Տորքի միավորների տեղափոխում. 1N.m≈10.2կգf.սմ≈141.6oz.դյույմ≈8.85lb.դյույմ | ||||||||||||||||||||||
| Եթե ձեզ հարկավոր են այլ պարամետրեր, խնդրում ենք կապվել գործընկերության հետ. | ||||||||||||||||||||||
| Դրավի դիրքային կապեր | ||||||||||||||||||||||
  | ||||||||||||||||||||||
Բարձր ճշգրտության քայլային շարժիչ | Nema11 | Ընդհանուր ավտոմատացման համար հավասարակշռված կատարում
1. 28 մմ շրջագծի չափ, ստանդարտ արդյունաբերական մոնտաժման նախշ
2. Պահման պտտման մոմենտի տիրույթ՝ 0,08–0,25 Ն·մ, քայլի անկյուն՝ 1,8°
3. Միջին և բարձր արագությունների դեպքում ցածր աղմուկ և ցածր ռեզոնանս
4. Համատեղելի է մոլորակային մեխանիզմի, էնկոդերի և վահանակավոր վահանակի հավաքվածքի հետ
Nema11 քայլային շարժիչը երկու փուլային հիբրիդային քայլային շարժիչ է՝ 28 մմ քառակուսի ֆլանցով: Այն առաջարկում է չափսի և պտտման մոմենտի միջև լավ հավասարակշռություն, ինչը դարձնում է այն տարբեր ավտոմատացված սարքավորումների համար հայտնի ընտրություն: Շարժիչը ունի ճշգրտորեն մեքենայացված ռոտոր և բարձր որակի մշտական մագնիսներ, որոնք ապահովում են հաստատուն քայլի ճշգրտություն և կրկնելիություն: Քայլի անկյունը 1,8° ± 5% է: Մենք առաջարկում ենք ընտրովի շարժիչներ՝ մեկ առանցքով, երկու առանցքով, դամպերով կամ առանց դամպերների, ինչպես նաև կարող ենք համատեղել դրանք միկրո մոլորակային մեխանիզմների հետ՝ ավելի բարձր պտտման մոմենտ ստանալու համար:
Շրջագծի չափը՝ 28 մմ, քայլի անկյունը՝ 1,8°, պահման պտտման մոմենտը՝ 0,08–0,25 Ն·մ, անվանական հոսանքը՝ 0,5–1,2 Ա, հնարավոր է հարմարեցված մեկնարկային և առանցքի տարբերակներ:
- CNC փորագրման մեքենաներ
- Բժշկական սիրինգային պոմպեր
- Ավտոմատացված տնտեսական մեքենաներ (ATM) և թղթադրամների վավերացման սարքեր
- Գրասենյակային ավտոմատացում (սկաներներ, կոպիրներ)
- Տեքստիլ մեքենաներ
- Ռոբոտային բռնակներ
1. Ստանդարտացված մոնտաժ՝ 28 մմ ճակատային մաս, համատեղելի է մեծամասնության ավտոմատացված սարքավորումների հետ:
2. Հարթ շարժում՝ օպտիմալացված է ցածր ռեզոնանսի և թարմացված թարմացման նվազեցման համար:
3. Պատկերացված ինտեգրում՝ աջակցում է մեխանիկական փոխանցման սարքերի, էնկոդերների և վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահանավոր վահ......
4. Արժեքային արդյունավետություն՝ հավասարակշռված արդյունավետություն բարձր ծավալով կիրառումների համար։








TJW46FA

TJP37F3650BL

TJP37R3650BL

RS775

