
Schnelllinks






 |
Typ | Hybrid stepper motor | Erregungsfolge | |||||||||||||||||||
| Flanschgröße | 28mm Quadrat | |||||||||||||||||||||
| Phasen | 2 | |||||||||||||||||||||
| Schrittgenauigkeit | ±5% | Stufe | A+ | B+ | - Ich weiß. | - Ich weiß. | ||||||||||||||||
| Radiale Kraft | 30N(6,5Lbs.) am Wellenende | |||||||||||||||||||||
| IP-Bewertung | IP40 | 1 | + | + | - | - | ||||||||||||||||
| Betriebstemperatur | -20℃bis +50 ℃ | 2 | - | + | + | - | ||||||||||||||||
| Isolationsklasse | B, 130 ℃ | 3 | - | - | + | + | ||||||||||||||||
| Isolationswiderstand | 100 MΩ | CW | 4 | + | - | - | + | Zcw | ||||||||||||||
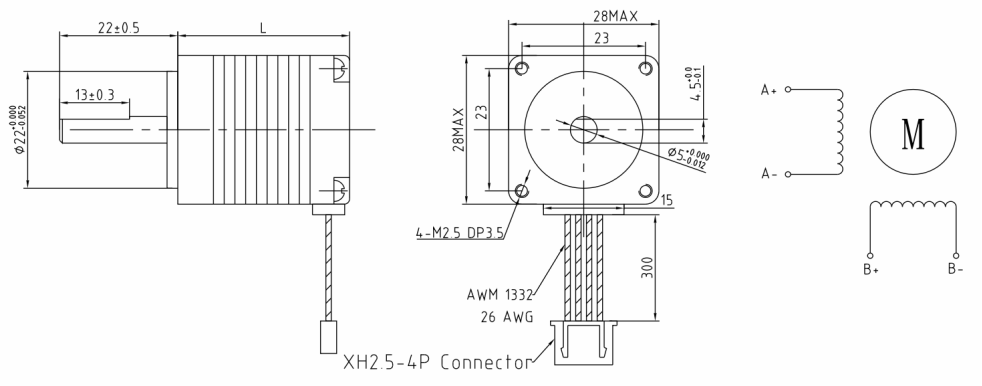
| Abmessungen (mm) | ||||||||||||||||||||||
 | ||||||||||||||||||||||
| Technische Daten | ||||||||||||||||||||||
| Modell | Schrittwinkel | Motorlänge | Aktuell | Widerstand | Induktivität | Haltedrehmoment | Klickschalldrehmoment | Trägheit | Drähte | Gewicht | ||||||||||||
| (° ) | L(mm) | (A) | (Ω) | (mH) | (N·m) | (N·cm) | (g·cm²) | (Anz.) | (g) | |||||||||||||
| TH2828HS-6004 | 1.8 | 28 | 0.60 | 4.2 | 2.2 | 0.045 | 0.3 | 6.0 | 4 | 105 | ||||||||||||
| TH2833HS-3504 | 1.8 | 33 | 0.35 | 15.0 | 9.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2833HS-6004 | 1.8 | 33 | 0.60 | 5.5 | 3.2 | 0.060 | 0.4 | 9.0 | 4 | 110 | ||||||||||||
| TH2845HS-7004 | 1.8 | 45 | 0.70 | 7.0 | 5.0 | 0.080 | 0.6 | 11.0 | 4 | 140 | ||||||||||||
| TH2845HS-9506 | 1.8 | 45 | 0.95 | 3.4 | 1.2 | 0.060 | 0.6 | 11.0 | 6 | 140 | ||||||||||||
| TH2851HS-6004 | 1.8 | 51 | 0.60 | 9.0 | 7.2 | 0.100 | 0.8 | 13.0 | 4 | 180 | ||||||||||||
| TH2851HS-9306 | 1.8 | 51 | 0.93 | 4.6 | 1.8 | 0.080 | 0.8 | 13.0 | 6 | 180 | ||||||||||||
| Drehmomentumrechnung: 1N·m≈10.2kgf·cm≈141.6oz·in≈8.85lb·in | ||||||||||||||||||||||
| Wenn Sie andere Parameter benötigen, wenden Sie sich bitte an den Kundenservice. | ||||||||||||||||||||||
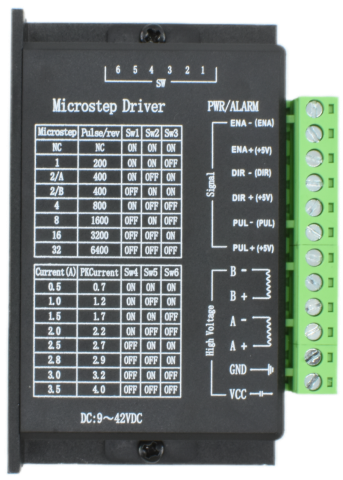
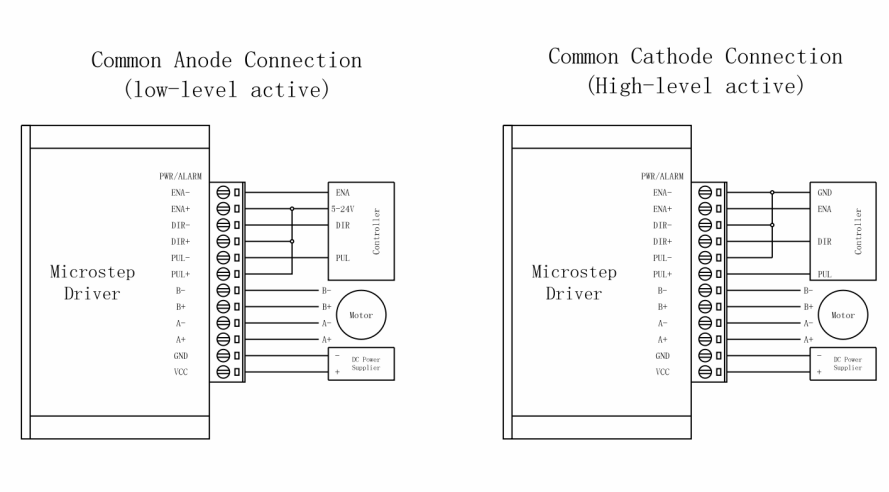
| Anschlüsse des Motorsteuersystems | ||||||||||||||||||||||
  | ||||||||||||||||||||||
Hochpräziser Schrittmotor | Nema11 | Ausgewogenes Leistungsverhältnis für die allgemeine Automatisierung
1. Rahmenabmessung 28 mm, standardmäßiges industrieller Montagemuster
2. Haltemomentbereich: 0,08–0,25 Nm, Schrittwinkeleinstellung 1,8°
3. Geringes Geräusch- und Resonanzniveau bei mittleren bis hohen Drehzahlen
4. Kompatibel mit Planetengetriebe, Encoder und Spindelbaugruppe
Der Nema11-Schrittmotor ist ein zweiphasiger Hybrid-Schrittmotor mit quadratischem Flansch von 28 mm. Er bietet ein gutes Verhältnis zwischen Baugröße und Drehmoment und ist daher eine beliebte Wahl für verschiedene Automatisierungsgeräte. Der Motor verfügt über einen präzisionsgefertigten Rotor und hochwertige Permanentmagnete, was eine konstante Schrittgenauigkeit und Wiederholgenauigkeit gewährleistet. Der Schrittwinke beträgt 1,8° ± 5 %. Wir bieten optionale Motorausführungen an, z. B. mit einer oder zwei Wellen, mit oder ohne Dämpfer; zudem können sie mit mikroplanetaren Getrieben kombiniert werden, um ein höheres Drehmoment zu erzielen.
Rahmenabmessung 28 mm, Schrittwinkeleinstellung 1,8°, Haltemoment 0,08–0,25 Nm, Nennstrom 0,5–1,2 A, individuelle Wicklung und Welle auf Anfrage verfügbar.
- CNC-Gravurmaschinen
- Medizinische Spritzenpumpen
- Geldautomaten und Banknotenprüfgeräte
- Büroautomatisierung (Scanner, Kopierer)
- Textilmaschinen
- Roboter-Endeffektoren (Greifer)
1. Standardisierte Montage: 28-mm-Flansch, kompatibel mit den meisten Automatisierungsgeräten.
2. Glatte Bewegung: Optimiert für geringe Resonanz und reduzierte Vibration.
3. Flexible Integration: Unterstützt Zusatzkomponenten wie Getriebe, Encoder und Spindel.
4. Kostenoptimiert: Ausgewogene Leistung für Anwendungen mit hohem Volumen.








TJW46FA

TJP37F3650BL

TJP37R3650BL

RS775

