
Pautan Pantas





| DC Planetary Gear Motor motor pengurangan planet DC | 7.5 Nm | 25 Watts | |||||||||||||||||||
| Motor DC berburu RS565 mikro dengan gear box planetari | Untuk digabungkan dengan | ||||||||||||||||||||
| Pengekod penderia Hall | |||||||||||||||||||||
| boleh digabungkan dengan pengekod magnetik | |||||||||||||||||||||
| Siri TJX36RGd | |||||||||||||||||||||
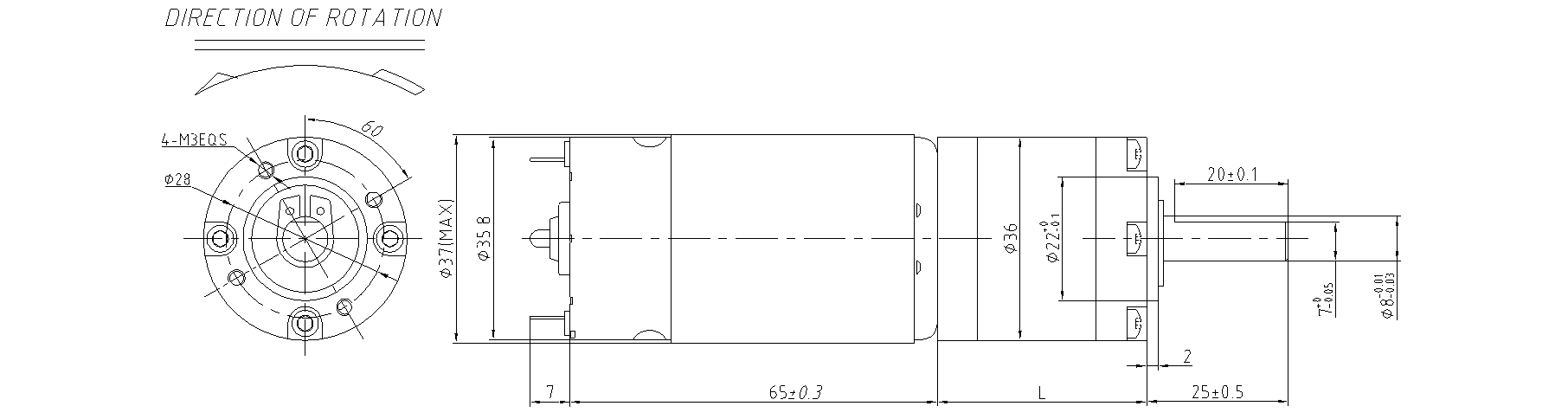
| Gambar Dimensi gambar saiz luaran (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Gambar motor gambar sebenar motor | |||||||||||||||||||||
 | |||||||||||||||||||||
| Ciri-ciri motor ciri-ciri motor | |||||||||||||||||||||
| Bahan Perumahan bahan permukaan pemasangan | Paduan zink zinc Alloy | ||||||||||||||||||||
| Bahan rantai gear bahan gear | Keluli & Metalurgi serbuk metalurgi serbuk, gigi keluli | ||||||||||||||||||||
| Gandaan belakang pembezaan gear | ≤2° | ||||||||||||||||||||
| Bearings pada paksi output Bearing paksi output | Galas Bola bearing bola | ||||||||||||||||||||
| Kelajuan input maksimum yang disyorkan kelajuan input maksimum yang dicadangkan | ≤10000RPM | ||||||||||||||||||||
| Daya Radial kuasa radial | ≤8kgf | ||||||||||||||||||||
| Daya axial 轴向力 | ≤3kgf | ||||||||||||||||||||
| Tekanan maksimum pada paksi kuasa tekanan maksimum yang boleh diterima oleh paksi utama | ≤15kgf | ||||||||||||||||||||
| Kelupusan radial 径向间隙 | ≤ 0,1mm | ||||||||||||||||||||
| Kelupusan axial 轴向间隙 | ≤0.4mm | ||||||||||||||||||||
| Julat suhu operasi julat suhu penggunaan | -20℃-120℃ | ||||||||||||||||||||
| Komutator struktur penukaran | Disikat | ||||||||||||||||||||
| Arah putaran arah putaran | CW / CCW | ||||||||||||||||||||
| Bunyi hinggar | ≤ 60dB | ||||||||||||||||||||
| Maklumat Teknikal Motor DC parameter Motor DC | |||||||||||||||||||||
| Nilai pada 25-30 ℃ nombor ukuran pada suhu bilik | |||||||||||||||||||||
|
Model model |
Voltan bernombor (V ) voltan berperingkat |
Tiada Beban parameter tiada beban |
Berperingkat parameter berperingkat |
Tamat parameter tamat putaran |
*Tips: Maklumat spesifikasi di sebelah kiri adalah terhad, sila hubungi kakitangan kami untuk maklumat parameter yang lebih lengkap. petunjuk: Parameter jadual data di sebelah kiri adalah terhad, sila hubungi khidmat pelanggan untuk maklumat parameter lanjut. |
||||||||||||||||
|
Kelajuan kelajuan putaran |
Semasa arus |
Kelajuan kelajuan putaran |
Semasa arus |
Tork tork |
Output kerja keluaran |
Eff kecekapan |
Tork tork |
Semasa arus |
|||||||||||||
| rpm | mA | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RS565 | 10.5 | 8000 | 702 | 6400 | 2.70 | 27.69 | 18.56 | 65.38 | 83.07 | 19.80 | |||||||||||
| RS565 | 24 | 8000 | 290 | 6400 | 1.29 | 30.40 | 20.37 | 66.06 | 91.20 | 10.20 | |||||||||||
| Data Teknikal Motor Dengan Gearbox parameter Motor Pemulangan | |||||||||||||||||||||
| Data Gearbox parameter Kotak Gear | |||||||||||||||||||||
|
Nisbah gear nisbah pemulangan n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Bilangan peringkat gear bilangan peringkat pemberianan |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Panjang kotak gear panjang kotak gear (mm) |
28.2 | 28.2 | 37 | 37 | 37 | 45.8 | 45.8 | 45.8 | 45.8 | 54.7 | 54.7 | 54.7 | 54.7 | 54.7 | 64 | 64 | 64 | 64 | 64 | ||
|
Kecekapan kecekapan (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RS565-10.5V-8000R | |||||||||||||||||||||
|
Kelajuan tanpa beban kelajuan tanpa beban (RPM) |
2162.2 | 1538.5 | 583.9 | 416.7 | 297.4 | 156.9 | 112.7 | 80.0 | 57.6 | 42.3 | 30.3 | 21.7 | 15.6 | 11.1 | 8.2 | 5.9 | 4.2 | 3.0 | 2.2 | ||
|
Kelajuan yang dinilai kelajuan berperingkat (RPM) |
1729.7 | 1230.8 | 467.2 | 333.3 | 237.9 | 125.5 | 90.1 | 64.0 | 46.0 | 33.9 | 24.2 | 17.3 | 12.5 | 8.9 | 6.6 | 4.7 | 3.3 | 2.4 | 1.8 | ||
|
Tork yang dinilai tork berperingkat (N.m) |
0.087 | 0.122 | 0.274 | 0.384 | 0.538 | 0.867 | 1.207 | 1.701 | 2.364 | 2.732 | 3.816 | 5.334 | 7.401 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
Tork yang dinilai tork berperingkat (KG.CM) |
0.85 | 1.20 | 2.69 | 3.76 | 5.27 | 8.50 | 11.83 | 16.67 | 23.16 | 26.77 | 37.40 | 52.27 | 72.53 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
Tork yang dinilai tork berperingkat (LB.IN) |
0.98 | 1.38 | 3.09 | 4.34 | 6.08 | 9.79 | 13.63 | 19.20 | 26.69 | 30.85 | 43.09 | 60.22 | 83.56 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
| RS565-24V-8000R | |||||||||||||||||||||
|
Kelajuan tanpa beban kelajuan tanpa beban (RPM) |
2162.2 | 1538.5 | 583.9 | 416.7 | 297.4 | 156.9 | 112.7 | 80.0 | 57.6 | 42.3 | 30.3 | 21.7 | 15.6 | 11.1 | 8.2 | 5.9 | 4.2 | 3.0 | 2.2 | ||
|
Kelajuan yang dinilai kelajuan berperingkat (RPM) |
1729.7 | 1230.8 | 467.2 | 333.3 | 237.9 | 125.5 | 90.1 | 64.0 | 46.0 | 33.9 | 24.2 | 17.3 | 12.5 | 8.9 | 6.6 | 4.7 | 3.3 | 2.4 | 1.8 | ||
|
Tork yang dinilai tork berperingkat (N.m) |
0.096 | 0.134 | 0.301 | 0.422 | 0.591 | 0.952 | 1.326 | 1.867 | 2.595 | 2.999 | 4.189 | 5.856 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
Tork yang dinilai tork berperingkat (KG.CM) |
0.94 | 1.32 | 2.95 | 4.13 | 5.79 | 9.33 | 12.99 | 18.30 | 25.43 | 29.39 | 41.06 | 57.39 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
Tork yang dinilai tork berperingkat (LB.IN) |
1.08 | 1.52 | 3.40 | 4.76 | 6.67 | 10.75 | 14.97 | 21.08 | 29.30 | 33.86 | 47.30 | 66.12 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
| Motor gear kotak lengkung contoh kurva motor pemberat | |||||||||||||||||||||
| Projek nama projek : | Motor Gear DC | Tarikh tarikh : | 2025/3/26 | Kefahaman (dalam suhu sekitar 25-30 ℃) | |||||||||||||||||
| Kelajuan motor kelajuan putaran : | 8000RPM | Skala penuh julat pengukuran : | 100% | Eff | Ujian pantas untuk mengelakkan kenaikan suhu dan kerosakan kelebihan beban. | ||||||||||||||||
| Rantai gear tahap : | 1 | 50.0 | Watt | Voltan berterusan muatan tekanan malar : | 10.5 | Volt | |||||||||||||||
| Nisbah gear nisbah pemulangan : | 5.2 | 20.0 | Ampere | Arah arah : | IK/ILK | ||||||||||||||||
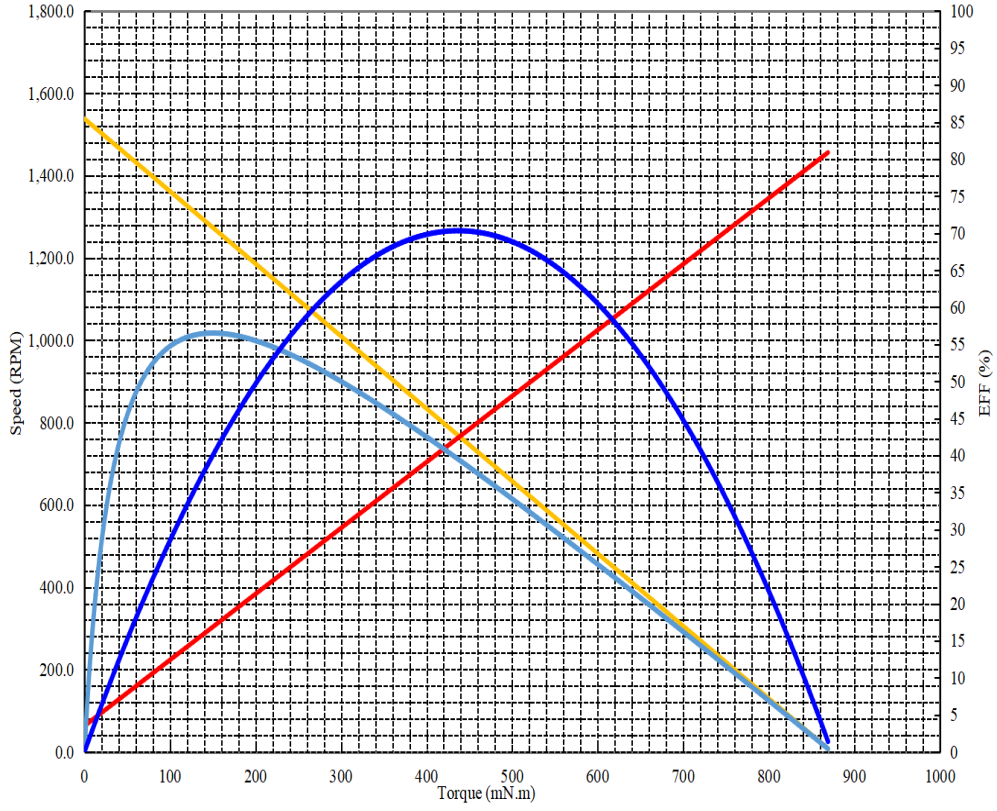 |
Pada tiada beban parameter tiada beban | ||||||||||||||||||||
| Kelajuan kelajuan putaran : | 1538.0 | Rpm | |||||||||||||||||||
| Semasa arus : | 0.70 | Amp | |||||||||||||||||||
| Parameter seketika maksimum parameter sesaat maksimum | |||||||||||||||||||||
| Tork tork : | 856.42 | mN-m | |||||||||||||||||||
| Semasa arus : | 16.26 | Amp | |||||||||||||||||||
| Pada kecekapan maksimum parameter titik kecekapan tertinggi | |||||||||||||||||||||
| Kecekapan kecekapan : | 56.5 | % | |||||||||||||||||||
| Tork tork : | 150.1 | mN-m | |||||||||||||||||||
| Kelajuan kelajuan putaran : | 1273.7 | Rpm | |||||||||||||||||||
| Semasa arus : | 3.37 | Amp | |||||||||||||||||||
| Output kuasa keluaran : | 20.02 | Watt | |||||||||||||||||||
| Pada keluaran kuasa maksimum parameter keluaran kuasa maksimum | |||||||||||||||||||||
| Output kuasa keluaran : | 35.167 | Watt | |||||||||||||||||||
| Tork tork : | 436.7 | mN-m | |||||||||||||||||||
| Kelajuan kelajuan putaran : | 769.0 | Rpm | |||||||||||||||||||
| Semasa arus : | 8.48 | Amp | |||||||||||||||||||
| Kombinasi Pengeluaran aksesori lain | |||||||||||||||||||||
| Aksesori nama | Voltan voltan | Resolusi resolusi | Bilangan saluran | Catatan | |||||||||||||||||
| Enkoder Magnetik enkoder magnetik | 5V-24V | 12ppr | A&B | ||||||||||||||||||
Gearbox Planetari Jejari Keluaran Berganda 36 mm | TJX36RGd | Reka Bentuk Jejari Melalui
1. Gearbox planetari 36 mm dengan jejari keluaran berganda (akhiran RGd)
2. Tork keluaran sehingga 28 Nm, nisbah pengurangan 5–200:1
3. Pilihan jejari melalui berongga (diameter dalaman maksimum 8 mm)
4. Membenarkan pemasangan wayar atau saluran bendalir melalui bahagian tengah
TJX36RGd dilengkapi jejari keluaran berongga dengan kedua-dua hujungnya dapat diakses. Lubang berongga (diameter maksimum 8 mm) membenarkan kabel, hos udara atau tiub bendalir melalui pusat gearbox. Tork keluaran ialah 28 Nm. Nisbah pengurangan dari 5:1 hingga 200:1. Kelonggaran belakang <1°. Gearbox ini boleh dipacu oleh sebarang motor 36 mm.
Diameter 36 mm, diameter dalaman jejari berongga 6–8 mm, tork 28 Nm, nisbah 5–200:1.
- Sendi robot kolaboratif
- Pengurusan kabel dalam mekanisme berputar
- Pengeluar putaran endoskop perubatan
- Persimpangan berputar untuk saluran pneumatik/hidraulik
1. Acuan berongga: Membenarkan laluan wayar atau bendalir.
2. Keluaran dwi: Memacu beban dari kedua-dua hujung.
3. Integrasi padat: Tiada pengurusan kabel luaran diperlukan.








TJX42RT

TJZ37FGa

TJP37F3650BL

TJP37FG

