
Pautan Pantas






| DC Planetary Gear Motor motor pengurangan planet DC | 5 Nm | 2 Watts | |||||||||||||||||||
| RF280 Motor DC berburu mikro dengan gearbox planet | Untuk digabungkan dengan | ||||||||||||||||||||
| Pengekod penderia Hall | |||||||||||||||||||||
| boleh digabungkan dengan pengekod magnetik | |||||||||||||||||||||
| Siri TJX24RD | |||||||||||||||||||||
| Gambar Dimensi gambar saiz luaran (mm) | |||||||||||||||||||||
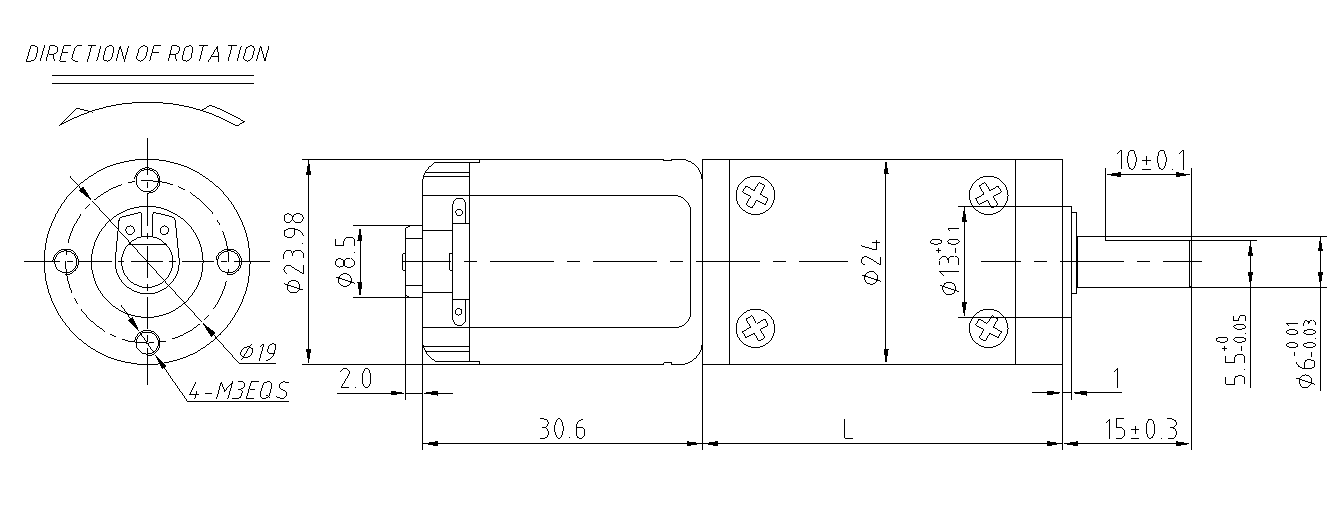 | |||||||||||||||||||||
| Gambar motor gambar sebenar motor | |||||||||||||||||||||
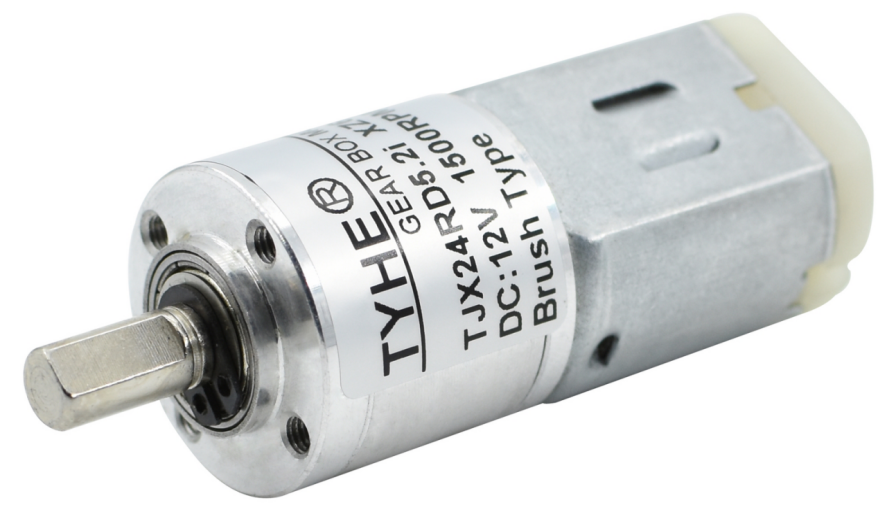 | |||||||||||||||||||||
| Ciri-ciri motor ciri-ciri motor | |||||||||||||||||||||
| Bahan Perumahan bahan permukaan pemasangan | Aloi Aluminium aluminium | ||||||||||||||||||||
| Bahan rantai gear bahan gear | Keluli keluli | ||||||||||||||||||||
| Gandaan belakang pembezaan gear | ≤2° | ||||||||||||||||||||
| Bearings pada paksi output Bearing paksi output | Galas Bola bearing bola | ||||||||||||||||||||
| Kelajuan input maksimum yang disyorkan kelajuan input maksimum yang dicadangkan | ≤15000RPM | ||||||||||||||||||||
| Daya Radial kuasa radial | ≤2.5kgf | ||||||||||||||||||||
| Daya axial 轴向力 | ≤1kgf | ||||||||||||||||||||
| Tekanan maksimum pada paksi kuasa tekanan maksimum yang boleh diterima oleh paksi utama | ≤7kgf | ||||||||||||||||||||
| Kelupusan radial 径向间隙 | ≤0.05mm | ||||||||||||||||||||
| Kelupusan axial 轴向间隙 | ≤0.3mm | ||||||||||||||||||||
| Julat suhu operasi julat suhu penggunaan | -20℃-120℃ | ||||||||||||||||||||
| Komutator struktur penukaran | Disikat | ||||||||||||||||||||
| Arah putaran arah putaran | CW / CCW | ||||||||||||||||||||
| Bunyi hinggar | ≤40dB | ||||||||||||||||||||
| Maklumat Teknikal Motor DC parameter Motor DC | |||||||||||||||||||||
| Nilai pada 25-30 ℃ nombor ukuran pada suhu bilik | |||||||||||||||||||||
|
Model model |
Voltan bernombor (V ) voltan berperingkat |
Tiada Beban parameter tiada beban |
Berperingkat parameter berperingkat |
Tamat parameter tamat putaran |
*Tips: Maklumat spesifikasi di sebelah kiri adalah terhad, sila hubungi kakitangan kami untuk maklumat parameter yang lebih lengkap. petunjuk: Parameter jadual data di sebelah kiri adalah terhad, sila hubungi khidmat pelanggan untuk maklumat parameter lanjut. |
||||||||||||||||
|
Kelajuan kelajuan putaran |
Semasa arus |
Kelajuan kelajuan putaran |
Semasa arus |
Tork tork |
Output kerja keluaran |
Eff kecekapan |
Tork tork |
Semasa arus |
|||||||||||||
| rpm | mA | rpm | A | mN.m | W | % | mN.m | A | |||||||||||||
| RF280 | 12 | 6800 | 30 | 5440 | 0.10 | 1.30 | 0.74 | 64.96 | 3.90 | 0.60 | |||||||||||
| RF280 | 24 | 6800 | 14 | 5440 | 0.05 | 1.35 | 0.77 | 63.87 | 4.05 | 0.35 | |||||||||||
| Data Teknikal Motor Dengan Gearbox parameter Motor Pemulangan | |||||||||||||||||||||
| Data Gearbox parameter Kotak Gear | |||||||||||||||||||||
|
Nisbah gear nisbah pemulangan n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Bilangan peringkat gear bilangan peringkat pemberianan |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Panjang kotak gear panjang kotak gear (mm) |
22.4 | 22.4 | 27.6 | 27.6 | 27.6 | 32.8 | 32.8 | 32.8 | 32.8 | 39 | 39 | 39 | 39 | 39 | 45.2 | 45.2 | 45.2 | 45.2 | 45.2 | ||
|
Kecekapan kecekapan (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| RF280-12V-6800R | |||||||||||||||||||||
|
Kelajuan tanpa beban kelajuan tanpa beban (RPM) |
1837.8 | 1307.7 | 496.4 | 354.2 | 252.8 | 133.3 | 95.8 | 68.0 | 48.9 | 36.0 | 25.8 | 18.4 | 13.3 | 9.4 | 7.0 | 5.0 | 3.6 | 2.5 | 1.9 | ||
|
Kelajuan yang dinilai kelajuan berperingkat (RPM) |
1470.3 | 1046.2 | 397.1 | 283.3 | 202.2 | 106.7 | 76.6 | 54.4 | 39.1 | 28.8 | 20.6 | 14.7 | 10.6 | 7.5 | 5.6 | 4.0 | 2.8 | 2.0 | 1.5 | ||
|
Tork yang dinilai tork berperingkat (N.m) |
0.004 | 0.006 | 0.013 | 0.018 | 0.025 | 0.041 | 0.057 | 0.080 | 0.111 | 0.128 | 0.179 | 0.250 | 0.347 | 0.489 | 0.564 | 0.789 | 1.102 | 1.541 | 2.099 | ||
|
Tork yang dinilai tork berperingkat (KG.CM) |
0.04 | 0.06 | 0.13 | 0.18 | 0.25 | 0.40 | 0.56 | 0.78 | 1.09 | 1.26 | 1.76 | 2.45 | 3.40 | 4.79 | 5.52 | 7.73 | 10.80 | 15.10 | 20.57 | ||
|
Tork yang dinilai tork berperingkat (LB.IN) |
0.05 | 0.06 | 0.15 | 0.20 | 0.29 | 0.46 | 0.64 | 0.90 | 1.25 | 1.45 | 2.02 | 2.83 | 3.92 | 5.52 | 6.36 | 8.90 | 12.45 | 17.40 | 23.70 | ||
| RF280-24V-6800R | |||||||||||||||||||||
|
Kelajuan tanpa beban kelajuan tanpa beban (RPM) |
1837.8 | 1307.7 | 496.4 | 354.2 | 252.8 | 133.3 | 95.8 | 68.0 | 48.9 | 36.0 | 25.8 | 18.4 | 13.3 | 9.4 | 7.0 | 5.0 | 3.6 | 2.5 | 1.9 | ||
|
Kelajuan yang dinilai kelajuan berperingkat (RPM) |
1470.3 | 1046.2 | 397.1 | 283.3 | 202.2 | 106.7 | 76.6 | 54.4 | 39.1 | 28.8 | 20.6 | 14.7 | 10.6 | 7.5 | 5.6 | 4.0 | 2.8 | 2.0 | 1.5 | ||
|
Tork yang dinilai tork berperingkat (N.m) |
0.004 | 0.006 | 0.013 | 0.019 | 0.026 | 0.042 | 0.059 | 0.083 | 0.115 | 0.133 | 0.186 | 0.260 | 0.361 | 0.508 | 0.585 | 0.819 | 1.145 | 1.601 | 2.180 | ||
|
Tork yang dinilai tork berperingkat (KG.CM) |
0.04 | 0.06 | 0.13 | 0.18 | 0.26 | 0.41 | 0.58 | 0.81 | 1.13 | 1.31 | 1.82 | 2.55 | 3.54 | 4.98 | 5.74 | 8.02 | 11.22 | 15.69 | 21.36 | ||
|
Tork yang dinilai tork berperingkat (LB.IN) |
0.05 | 0.07 | 0.15 | 0.21 | 0.30 | 0.48 | 0.66 | 0.94 | 1.30 | 1.50 | 2.10 | 2.94 | 4.07 | 5.74 | 6.61 | 9.25 | 12.92 | 18.07 | 24.61 | ||
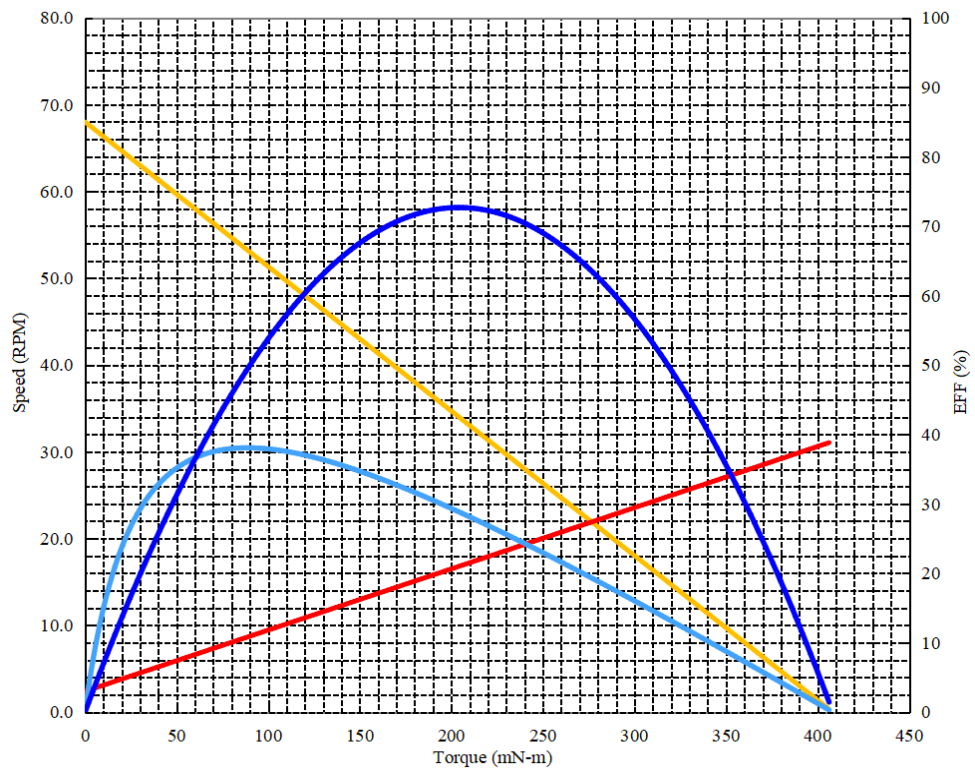
| Motor gear kotak lengkung contoh kurva motor pemberat | |||||||||||||||||||||
| Projek nama projek : | Motor Gear DC | Tarikh tarikh : | 2025/3/26 | Kefahaman (dalam suhu sekitar 25-30 ℃) | |||||||||||||||||
| Kelajuan motor kelajuan putaran : | 6800 rpm | Skala penuh julat pengukuran : | 100% | Eff | Ujian pantas untuk mengelakkan kenaikan suhu dan kerosakan kelebihan beban. | ||||||||||||||||
| Rantai gear tahap : | 3 | 1.0 | Watt | Voltan berterusan muatan tekanan malar : | 12 | Volt | |||||||||||||||
| Nisbah gear nisbah pemulangan : | 100 | 1.0 | Ampere | Arah arah : | IK/ILK | ||||||||||||||||
 |
Pada tiada beban parameter tiada beban | ||||||||||||||||||||
| Kelajuan kelajuan putaran : | 68.0 | Rpm | |||||||||||||||||||
| Semasa arus : | 0.030 | Amp | |||||||||||||||||||
| Parameter seketika maksimum parameter sesaat maksimum | |||||||||||||||||||||
| Tork tork : | 400.8 | mN-m | |||||||||||||||||||
| Semasa arus : | 0.390 | Amp | |||||||||||||||||||
| Pada kecekapan maksimum parameter titik kecekapan tertinggi | |||||||||||||||||||||
| Kecekapan kecekapan : | 38.1 | % | |||||||||||||||||||
| Tork tork : | 88.64 | mN-m | |||||||||||||||||||
| Kelajuan kelajuan putaran : | 53.2 | Rpm | |||||||||||||||||||
| Semasa arus : | 0.108 | Amp | |||||||||||||||||||
| Output kuasa keluaran : | 0.49 | Watt | |||||||||||||||||||
| Pada keluaran kuasa maksimum parameter keluaran kuasa maksimum | |||||||||||||||||||||
| Output kuasa keluaran : | 0.727 | Watt | |||||||||||||||||||
| Tork tork : | 204.1 | mN-m | |||||||||||||||||||
| Kelajuan kelajuan putaran : | 34.0 | Rpm | |||||||||||||||||||
| Semasa arus : | 0.21 | Amp | |||||||||||||||||||
| Kombinasi Pengeluaran aksesori lain | |||||||||||||||||||||
| Aksesori nama | Voltan voltan | Resolusi resolusi | Bilangan saluran | Catatan | |||||||||||||||||
| Enkoder Magnetik enkoder magnetik | 3V-12V | 3ppr, 6ppr | A&B | ||||||||||||||||||
Gearbox Planetari Berkilas Rendah | TJX24RD | Kilas Balik <0.5° untuk Ketepatan
1. Gearbox planetari 24 mm, akhiran RD dengan gear yang digilap secara tepat
2. Kilas balik ≤0.5° (piawai ≤1.5°), tork output sehingga 4 Nm
3. Galas planet yang telah diberi beban awal dan gigi gear yang dipadankan
4. Ideal untuk aplikasi penentuan kedudukan yang memerlukan pengulangan tinggi
TJX24RD ialah gearbox planetari gred presisi 24 mm dengan kilas balik dikurangkan kepada <0.5°. Ini dicapai melalui set gear yang dipadankan, galas yang diberi beban awal, dan pemesinan rumah gear berketepatan tinggi. Tork output mencapai 4 Nm. Nisbah pengurangan dari 4:1 hingga 100:1. Gearbox ini boleh dipasangkan dengan motor langkah atau motor servo untuk tugas penentuan kedudukan yang mencabar.
Diameter 24 mm, kilas balik <0.5°, nisbah 4–100:1, tork sehingga 4 Nm.
- Penentuan kedudukan sendi robot
- Robot pembedahan perubatan
- Sistem penjejakan optik
- Meja putar CNC
1. Kelongsoran ultra-rendah: <0,5° untuk ketepatan tinggi.
2. Kekuatan torsi tinggi: Reka bentuk pra-beban.
3. Penentuan kedudukan yang boleh diulang: Ideal untuk sistem langkah-langkah gelung-terbuka.








TJX22RC

TJP50RG

TJP37FQ

TJP37RH

