
Tautan Cepat





| DC Planetary Gear Motor motor pengurang kecepatan planet DC | 2 Nm | 4 Watts | |||||||||||||||||||
| motor DC sikat 180 Mikro dengan gearbox planet | Untuk kombinasi dengan | ||||||||||||||||||||
| Enkoder sensor Hall | |||||||||||||||||||||
| dapat dipadukan dengan enkoder magnetik | |||||||||||||||||||||
| TJX22RC Series | |||||||||||||||||||||
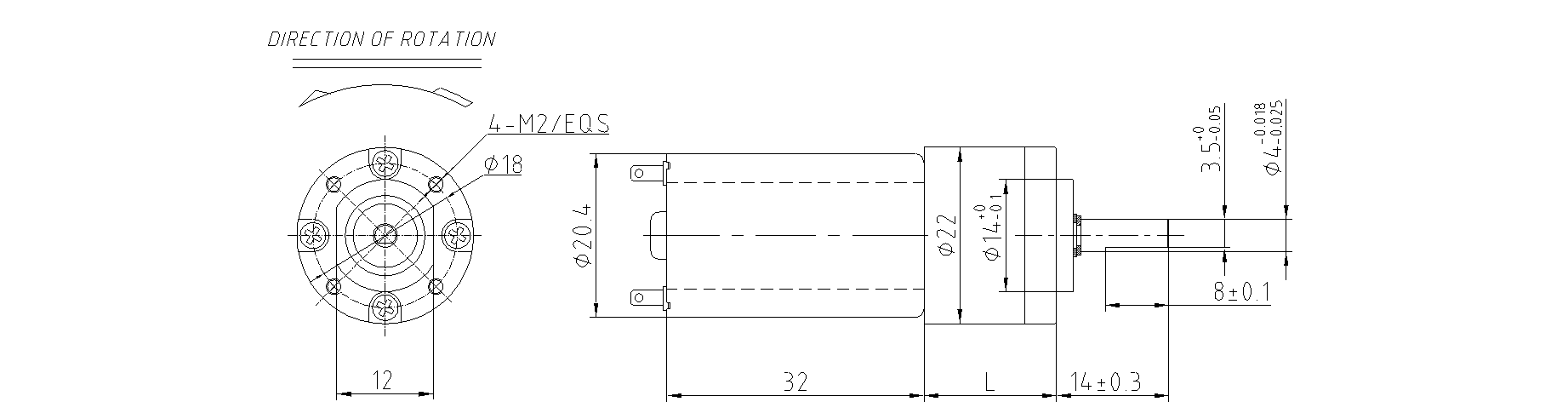
| Gambar Dimensi gambar dimensi luar (mm) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Gambar motor foto fisik motor | |||||||||||||||||||||
 | |||||||||||||||||||||
| Karakteristik motor karakteristik motor | |||||||||||||||||||||
| Bahan rumah bahan permukaan pemasangan | Paduan seng paduan seng | ||||||||||||||||||||
| Bahan rantai gigi bahan gigi | Metallurgi Serbuk metallurgi serbuk | ||||||||||||||||||||
| Back lash celah balik gigi | ≤2° | ||||||||||||||||||||
| Bearing pada poros keluaran bearing poros keluaran | Oil bearing bearing berminyak | ||||||||||||||||||||
| Kecepatan input maksimum yang disarankan kecepatan input maksimum yang disarankan | ≤15000rpm | ||||||||||||||||||||
| Gaya Radial gaya radial | ≤1kgf | ||||||||||||||||||||
| Gaya aksial gaya aksial | ≤0.6kgf | ||||||||||||||||||||
| Gaya tekan maksimum pada poros gaya penetrasi maksimum poros | ≤5kgf | ||||||||||||||||||||
| Kelengkungan radial celah radial | ≤0.05mm | ||||||||||||||||||||
| Celak axial jarak axial | ≤0.3mm | ||||||||||||||||||||
| Rentang suhu operasi rentang suhu penggunaan | -20℃-120℃ | ||||||||||||||||||||
| Komutator struktur pengalihan | Bersilat | ||||||||||||||||||||
| Arah putaran arah rotasi | CW / CCW | ||||||||||||||||||||
| Kebisingan bising | ≤40dB | ||||||||||||||||||||
| Data Teknis Motor DC parameter motor listrik | |||||||||||||||||||||
| Nilai pada 25-30 ℃ nilai pengukuran suhu ruangan | |||||||||||||||||||||
|
Model model |
Tegangan Terukur (V ) tegangan nominal |
Tanpa Beban parameter tanpa beban |
Dinilai parameter terukur |
Stall parameter tersumbat |
*Tips: Lembar data di sisi kiri terbatas, harap konsultasikan dengan staf kami untuk informasi parameter lebih lanjut. petunjuk: Parameter pada tabel data di sebelah kiri terbatas, silakan hubungi layanan pelanggan untuk mendapatkan lebih banyak informasi parameter. |
||||||||||||||||
|
Kecepatan kecepatan putar |
Saat ini arus |
Kecepatan kecepatan putar |
Saat ini arus |
Torsi torsi |
Output daya keluaran |
Efi efisiensi |
Torsi torsi |
Saat ini arus |
|||||||||||||
| menit | mA | menit | A | mN.m | S | % | mN.m | A | |||||||||||||
| 180 | 6 | 10000 | 195 | 8000 | 0.53 | 2.48 | 2.08 | 65.85 | 7.44 | 2.80 | |||||||||||
| 180 | 12 | 10000 | 103 | 8000 | 0.28 | 2.65 | 2.22 | 66.19 | 7.95 | 1.50 | |||||||||||
| Data Teknis Motor Dengan Gearbox parameter Motor Reduksi | |||||||||||||||||||||
| Data Gearbox parameter Kotak Reduksi | |||||||||||||||||||||
|
Rasio gear rasio Reduksi n : 1 |
4 | 4.75 | 12.3 | 16 | 19 | 43 | 58 | 76 | 90 | 107 | 150 | 204 | 276 | 304 | 375 | 525 | 713 | 1024 | 2036 | ||
|
Jumlah Tingkat Gear jumlah reduksi |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | ||
|
Panjang kotak gigi panjang gearbox (mm) |
13.1 | 13.1 | 16.7 | 16.7 | 16.7 | 20.3 | 20.3 | 20.3 | 20.3 | 20.3 | 23.9 | 23.9 | 23.9 | 23.9 | 23.9 | 27.5 | 27.5 | 27.5 | 27.5 | ||
|
Efisiensi efisiensi (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 180-6V-10000R | |||||||||||||||||||||
|
Kecepatan tanpa beban kecepatan tanpa beban (RPM) |
2500.0 | 2105.3 | 813.0 | 625.0 | 526.3 | 232.6 | 172.4 | 131.6 | 111.1 | 93.5 | 66.7 | 49.0 | 36.2 | 32.9 | 26.7 | 19.0 | 14.0 | 9.8 | 4.9 | ||
|
Kecepatan Terukur kecepatan terukur (RPM) |
2000.0 | 1684.2 | 650.4 | 500.0 | 421.1 | 186.0 | 137.9 | 105.3 | 88.9 | 74.8 | 53.3 | 39.2 | 29.0 | 26.3 | 21.3 | 15.2 | 11.2 | 7.8 | 3.9 | ||
|
Torsi terukur torsi terukur (N.m) |
0.008 | 0.010 | 0.022 | 0.029 | 0.034 | 0.065 | 0.088 | 0.116 | 0.137 | 0.163 | 0.194 | 0.264 | 0.357 | 0.394 | 0.485 | 0.578 | 0.785 | 1.127 | 2.000 | ||
|
Torsi terukur torsi terukur (KG.CM) |
0.08 | 0.10 | 0.22 | 0.28 | 0.33 | 0.64 | 0.87 | 1.13 | 1.34 | 1.60 | 1.90 | 2.59 | 3.50 | 3.86 | 4.76 | 5.66 | 7.69 | 11.04 | 19.60 | ||
|
Torsi terukur torsi terukur (LB.IN) |
0.10 | 0.11 | 0.25 | 0.32 | 0.38 | 0.74 | 1.00 | 1.31 | 1.55 | 1.84 | 2.19 | 2.98 | 4.03 | 4.44 | 5.48 | 6.52 | 8.86 | 12.72 | 22.58 | ||
| 180-12V-10000R | |||||||||||||||||||||
|
Kecepatan tanpa beban kecepatan tanpa beban (RPM) |
2500.0 | 2105.3 | 813.0 | 625.0 | 526.3 | 232.6 | 172.4 | 131.6 | 111.1 | 93.5 | 66.7 | 49.0 | 36.2 | 32.9 | 26.7 | 19.0 | 14.0 | 9.8 | 4.9 | ||
|
Kecepatan Terukur kecepatan terukur (RPM) |
2000.0 | 1684.2 | 650.4 | 500.0 | 421.1 | 186.0 | 137.9 | 105.3 | 88.9 | 74.8 | 53.3 | 39.2 | 29.0 | 26.3 | 21.3 | 15.2 | 11.2 | 7.8 | 3.9 | ||
|
Torsi terukur torsi terukur (N.m) |
0.009 | 0.011 | 0.024 | 0.031 | 0.036 | 0.070 | 0.094 | 0.124 | 0.146 | 0.174 | 0.207 | 0.282 | 0.382 | 0.421 | 0.519 | 0.617 | 0.838 | 1.204 | 2.000 | ||
|
Torsi terukur torsi terukur (KG.CM) |
0.09 | 0.10 | 0.23 | 0.30 | 0.36 | 0.69 | 0.93 | 1.21 | 1.44 | 1.71 | 2.03 | 2.77 | 3.74 | 4.12 | 5.08 | 6.05 | 8.22 | 11.80 | 19.60 | ||
|
Torsi terukur torsi terukur (LB.IN) |
0.10 | 0.12 | 0.27 | 0.35 | 0.41 | 0.79 | 1.07 | 1.40 | 1.65 | 1.97 | 2.34 | 3.19 | 4.31 | 4.75 | 5.86 | 6.97 | 9.47 | 13.59 | 22.58 | ||
| Motor gear kotak lengkungan contoh kurva motor pengurang kecepatan | |||||||||||||||||||||
| Proyek nama proyek : | DC Gear Motor | Tanggal tanggal : | 2025/3/26 | Kinerja (pada suhu lingkungan 25-30 ℃) | |||||||||||||||||
| Kecepatan motor kecepatan putar : | 10000RPM | Skala penuh rentang pengukuran : | 100% | Efi | Uji dengan cepat untuk mencegah kenaikan suhu dan kerusakan akibat overload. | ||||||||||||||||
| Rantai gigi tingkat : | 2 | 5.0 | Watts | Tegangan konstan pemuatan tekanan konstan : | 6 | Volt | |||||||||||||||
| Rasio gear rasio Reduksi : | 19 | 5.0 | Amp. | Arah arah : | CW/CCW | ||||||||||||||||
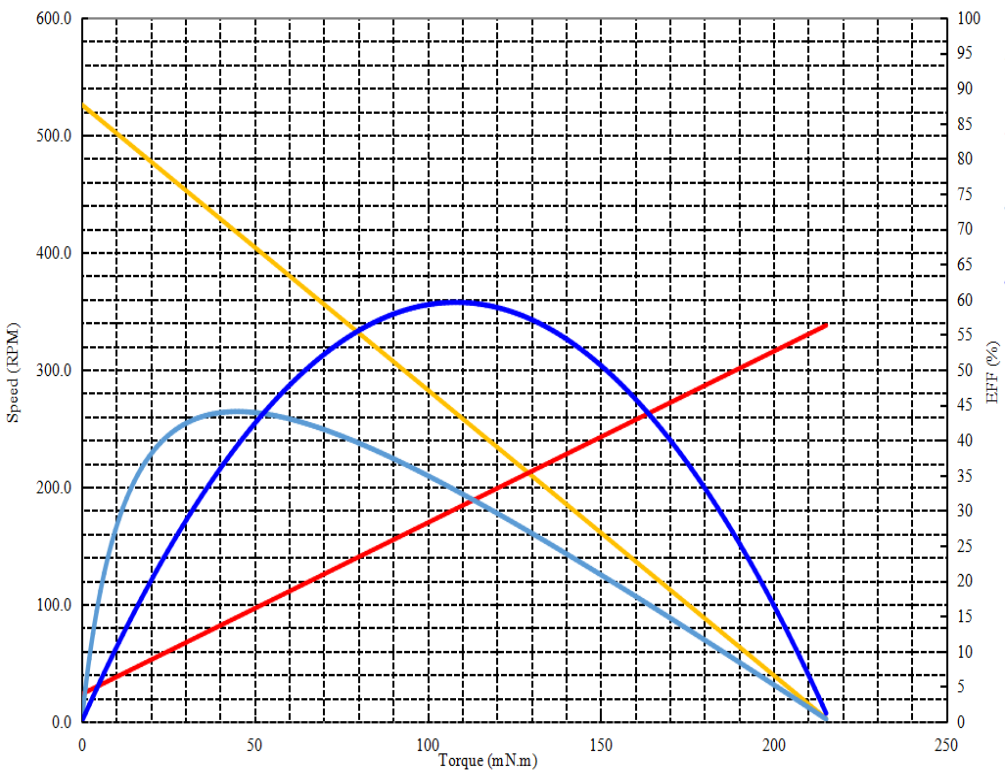 |
Pada kondisi tanpa beban parameter tanpa beban | ||||||||||||||||||||
| Kecepatan kecepatan putar : | 526.0 | Menit | |||||||||||||||||||
| Saat ini arus : | 0.20 | Ampere | |||||||||||||||||||
| Parameter instan maksimal parameter instan maksimum | |||||||||||||||||||||
| Torsi torsi : | 211.68 | mN-m | |||||||||||||||||||
| Saat ini arus : | 2.83 | Ampere | |||||||||||||||||||
| Pada efisiensi maksimum parameter titik efisiensi tertinggi | |||||||||||||||||||||
| Efisiensi efisiensi : | 44.0 | % | |||||||||||||||||||
| Torsi torsi : | 45.0 | mN-m | |||||||||||||||||||
| Kecepatan kecepatan putar : | 416.6 | Menit | |||||||||||||||||||
| Saat ini arus : | 0.74 | Ampere | |||||||||||||||||||
| Output daya keluaran : | 1.96 | Watts | |||||||||||||||||||
| Pada daya keluaran maksimum parameter keluaran daya maksimum | |||||||||||||||||||||
| Output daya keluaran : | 2.978 | Watts | |||||||||||||||||||
| Torsi torsi : | 108.1 | mN-m | |||||||||||||||||||
| Kecepatan kecepatan putar : | 263.0 | Menit | |||||||||||||||||||
| Saat ini arus : | 1.51 | Ampere | |||||||||||||||||||
| Kombinasi Produksi aksesori lainnya | |||||||||||||||||||||
| Aksesori nama | Tegangan tegangan | Resolusi resolusi | Jumlah Saluran | Catatan | |||||||||||||||||
| Magnetic Encoder enkoder Magnetik | 3V-12V | 3ppr, 6ppr, 12ppr | A&B | ||||||||||||||||||
Gearbox Planeteri Ringkas Sudut Kanan | TJX22RC | Output 90° untuk Ruang Terbatas
1. Gearbox planeteri sudut kanan 22 mm, akhiran RC
2. Torsi output hingga 2,0 Nm, rasio reduksi 15–150:1
3. Tahap input roda gigi bevel + tahap akhir planeteri
4. Offset output sangat rendah untuk pemasangan di sudut sempit
TJX22RC menggabungkan input roda gigi bevel dengan output planeteri dua tahap dalam rumah sudut kanan berdiameter 22 mm. Desain RC memungkinkan transmisi daya 90° dengan peningkatan ketinggian minimal. Torsi output mencapai 2,0 Nm. Backlash kurang dari 2°. Gearbox ini dapat digerakkan oleh motor 22 mm apa pun (berkuas, tanpa kuas, atau stepper). Sangat ideal untuk aplikasi di mana pemasangan sejajar tidak memungkinkan.
Diameter 22 mm, sudut kanan, rasio 15–150:1, torsi hingga 2,0 Nm, efisiensi 80%.
- Sendi pergelangan tangan robot
- Manipulator endoskop medis
- Penggerak konveyor ringkas
- Mekanisme pelipatan kaca spion otomotif
1. Desain sudut kanan hemat ruang: Pas di sudut.
2. Masukan bevel halus: Getaran dan kebisingan rendah.
3. Efisiensi tinggi: Tahap akhir planet mempertahankan torsi.








TJZ17RU

TJZ25RB

TJZ42FT

TJP42FGa

