
Γρήγοροι Σύνδεσμοι




| Κύκλος τροχιάς πλανητικού συστήματος DC διρεκτό πλανητικό μοτόρας μείωσης ταχύτητας | 10 Nm | 30 Watts | |||||||||||||||||||
| 4260BL Micro brushless dc motor with planetary gearbox | Για λειτουργίες με | ||||||||||||||||||||
| Έλεγχος PWM, CW/CCW, FG | |||||||||||||||||||||
| Έλεγχος PWM, αντίστροφη κατεύθυνση, αναμέτρηση ταχύτητας | |||||||||||||||||||||
| TJX42R4260BL Series | |||||||||||||||||||||
| Ζωγραφικό Σχέδιο σχέδιο εξωτερικών διαστάσεων (χιλ) | |||||||||||||||||||||
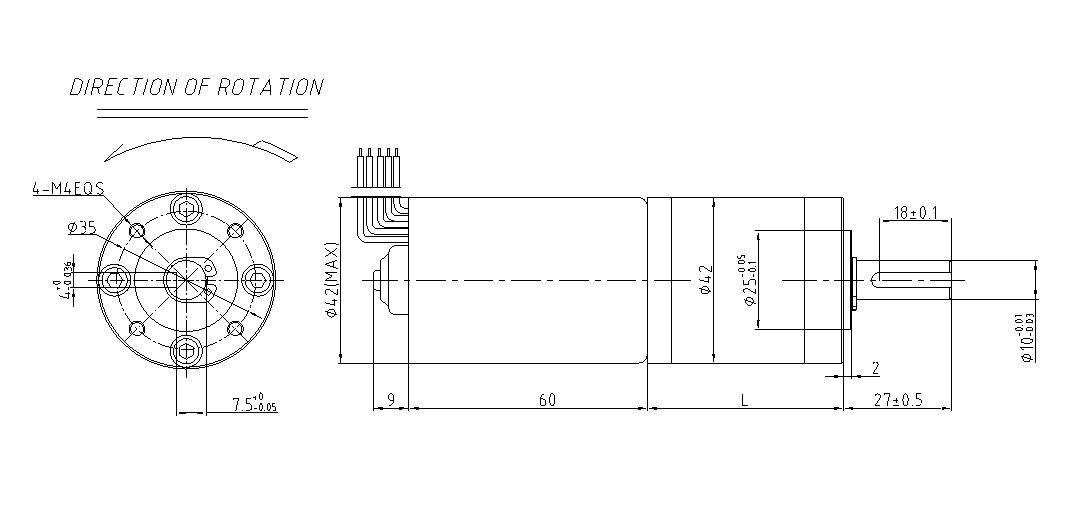 | |||||||||||||||||||||
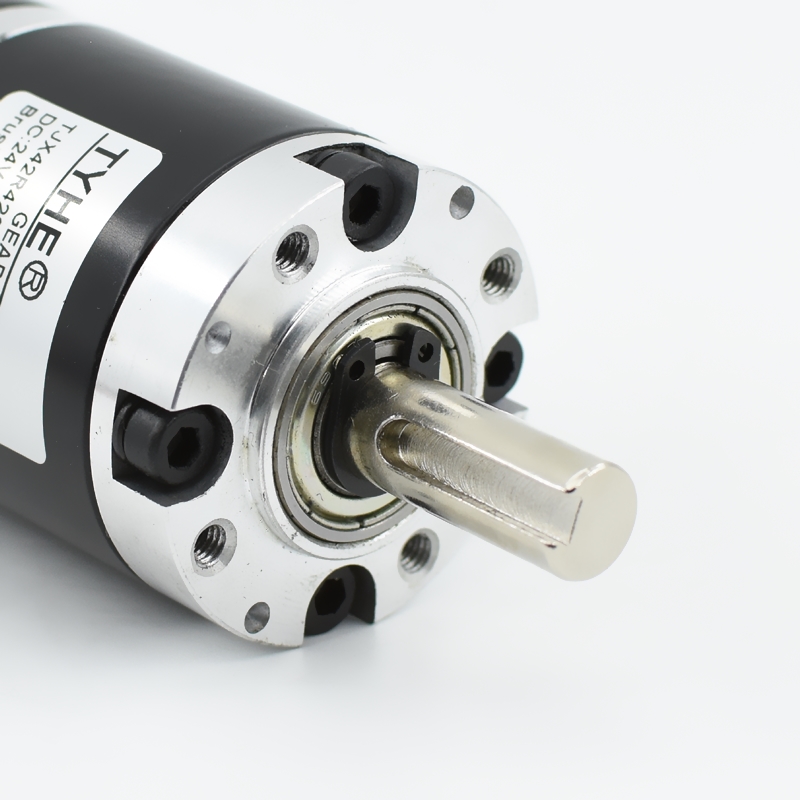
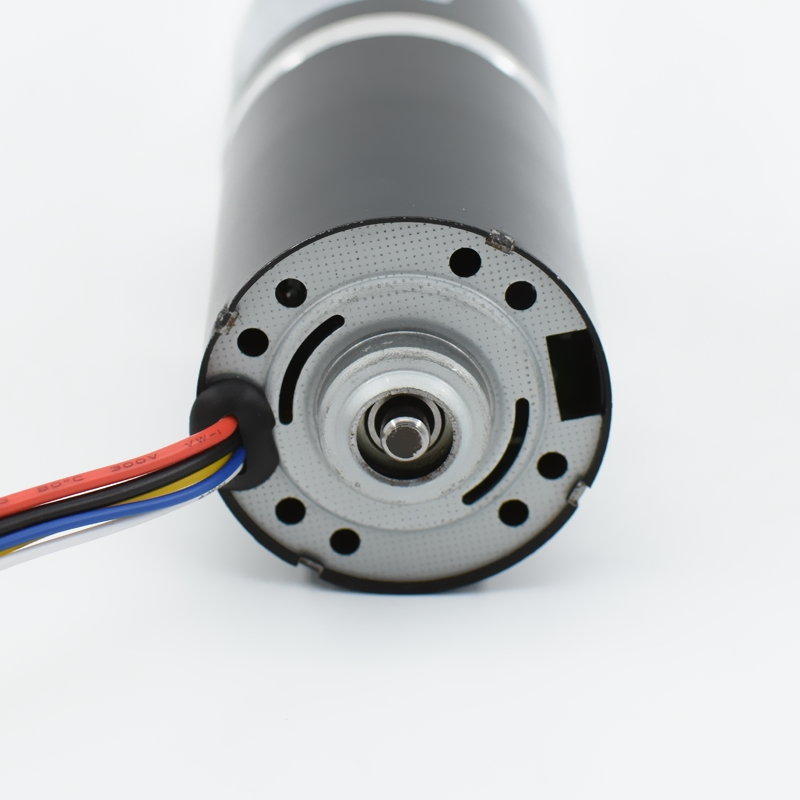
| Εικόνα μοτόρα φωτογραφία πραγματικού μοτέρ | |||||||||||||||||||||
 | |||||||||||||||||||||
| Χαρακτηριστικά μοτέρ ιδιότητες μοτέρ | |||||||||||||||||||||
| Υλικό στεγαστήρα υλικό εγκατάστασης | Κράμα ψευδαργύρου ζινκόχαλκη συμπεπλοκή | ||||||||||||||||||||
| Υλικό ζαχαροπλοΐου υλικό ράντα | Χάλκινος & Πλαστικός χάλυβας, δεντρικά χαράκια | ||||||||||||||||||||
| Αντιστροφή ροδιοειδές παράθυρο | ≤2° | ||||||||||||||||||||
| Κολοβόρα στον άξονα εξόδου κολοβόρα άξονα εξόδου | Κυλινδρικά Αντίφραση σφαιρική κολοβόρα | ||||||||||||||||||||
| Προτεινόμενη μέγιστη ταχύτητα εισόδου προτεινόμενη μέγιστη ταχύτητα εισόδου | ≤7000 RPM | ||||||||||||||||||||
| Ακτινοβαθμός Δύναμης ραδιακή δύναμη | ≤15kgf | ||||||||||||||||||||
| Αξονική δύναμη αξονική δύναμη | ≤8kgf | ||||||||||||||||||||
| Μέγιστη πίεση δύναμης στον αξόνα μέγιστη πίεση δύναμης που μπορεί να υποφέρει ο κύριος αξόνας | ≤25kgf | ||||||||||||||||||||
| Ραδιακό κενό ραδιακό κενό | ≤0,1 χλστ | ||||||||||||||||||||
| Αξονικό κενό αξονικό κενό | ≤0.4mm | ||||||||||||||||||||
| Εύρος θερμοκρασίας λειτουργίας ωθημένος όροφος θερμοκρασίας | -20℃-110℃ | ||||||||||||||||||||
| Κομμυτάτορας δομή αντιστροφής | Χωρίς βούρτσα | ||||||||||||||||||||
| Κατεύθυνση περιστροφής κατεύθυνση περιστροφής | CW / CCW | ||||||||||||||||||||
| Θόρυβος θόρυβος | ≤ 65dB | ||||||||||||||||||||
| Τεχνικά δεδομένα DC Motor παράμετροι άμεσου τροχαλιασμού μοτόρα | |||||||||||||||||||||
| Μετρήσεις σε 25-30 ℃ αποτιμήσεις μετρήσεων σε δωμάτιο κλιματοποίησης | |||||||||||||||||||||
|
Μοντέλο 型号 |
Διάταξη (V ) νομική Τάση |
Χωρίς Φορτίο παράμετροι Χωρίς Φορτίο |
Αξιολογημένη νομικοί Παράμετροι |
Στάλαγμα παράμετροι Στάλαγμα |
*Συμβουλές: Οι παραγωγικές φύλλα στα αριστερά είναι περιορισμένα, παρακαλώ επικοινωνήστε με το προσωπικό μας για περισσότερες πληροφορίες σχετικά με παράμετρους. συμβουλή: Οι παράμετροι του πίνακα δεδομένων αριστερά είναι περιορισμένοι, επικοινωνήστε με την υπηρεσία πελατών για περισσότερες πληροφορίες. |
||||||||||||||||
|
Ταχύτητα ταχύτητα |
Τρέχουσα ρεύμα |
Ταχύτητα ταχύτητα |
Τρέχουσα ρεύμα |
Στροφή ροπή |
Έξοδος έξισος ενέργειας |
Eff αποδοτικότητα |
Στροφή ροπή |
Τρέχουσα ρεύμα |
|||||||||||||
| σ.α.λ. | μαμά | σ.α.λ. | Α | mN.m | W | % | mN.m | Α | |||||||||||||
| 4260BL | 12 | 5000 | 392 | 4000 | 1.37 | 27.98 | 11.72 | 71.52 | 83.94 | 9.33 | |||||||||||
| 4260BL | 24 | 5000 | 207 | 4000 | 0.71 | 28.50 | 11.94 | 70.42 | 85.50 | 4.75 | |||||||||||
| Τεχνικά δεδομένα μοτόρα με γεαρμό παράμετροι μοτόρα με γεαρμό | |||||||||||||||||||||
| Δεδομένα γεαρμού παράμετροι γεαρμού | |||||||||||||||||||||
|
Αναλογία κιβωτίου λόγος μείωσης n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Αριθμός σταδίων τροχαλιών βαθμοί μειώσεως |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Μήκος κιβωτίου τροχαλιών μήκος κιβωτίου τροχαλιών (χιλ) |
29.7 | 29.7 | 39.4 | 39.4 | 39.4 | 49.1 | 49.1 | 49.1 | 49.1 | 60.3 | 60.3 | 60.3 | 60.3 | 60.3 | 71.5 | 71.5 | 71.5 | 71.5 | 71.5 | ||
|
Αποτελεσματικότητα αποδοτικότητα (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 4260BL-12V-5000R | |||||||||||||||||||||
|
Ταχύτητα χωρίς φορτίο ταχύτητα χωρίς φορτίο (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Ονομαστική Ταχύτητα νομιμή ταχύτητα (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Ονομαστική ροπή νομιμή ροπή (Ν.μ) |
0.088 | 0.124 | 0.277 | 0.388 | 0.544 | 0.876 | 1.220 | 1.718 | 2.388 | 2.760 | 3.856 | 5.390 | 7.478 | 10.000 | 10.000 | 10.000 | 10.000 | 10.000 | 10.000 | ||
|
Ονομαστική ροπή νομιμή ροπή (KG.CM) |
0.86 | 1.21 | 2.71 | 3.80 | 5.33 | 8.59 | 11.96 | 16.84 | 23.41 | 27.05 | 37.79 | 52.82 | 73.29 | 98.00 | 98.00 | 98.00 | 98.00 | 98.00 | 98.00 | ||
|
Ονομαστική ροπή νομιμή ροπή (LB.IN) |
0.99 | 1.40 | 3.13 | 4.38 | 6.14 | 9.89 | 13.77 | 19.40 | 26.97 | 31.17 | 43.54 | 60.85 | 84.43 | 112.91 | 112.91 | 112.91 | 112.91 | 112.91 | 112.91 | ||
| 4260BL-24V-5000R | |||||||||||||||||||||
|
Ταχύτητα χωρίς φορτίο ταχύτητα χωρίς φορτίο (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Ονομαστική Ταχύτητα νομιμή ταχύτητα (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Ονομαστική ροπή νομιμή ροπή (Ν.μ) |
0.090 | 0.126 | 0.282 | 0.395 | 0.554 | 0.893 | 1.243 | 1.750 | 2.433 | 2.812 | 3.928 | 5.490 | 7.617 | 10.000 | 10.000 | 10.000 | 10.000 | 10.000 | 10.000 | ||
|
Ονομαστική ροπή νομιμή ροπή (KG.CM) |
0.88 | 1.23 | 2.76 | 3.87 | 5.43 | 8.75 | 12.18 | 17.15 | 23.84 | 27.56 | 38.49 | 53.80 | 74.65 | 98.00 | 98.00 | 98.00 | 98.00 | 98.00 | 98.00 | ||
|
Ονομαστική ροπή νομιμή ροπή (LB.IN) |
1.01 | 1.42 | 3.19 | 4.46 | 6.25 | 10.08 | 14.03 | 19.76 | 27.47 | 31.75 | 44.35 | 61.98 | 86.00 | 112.91 | 112.91 | 112.91 | 112.91 | 112.91 | 112.91 | ||
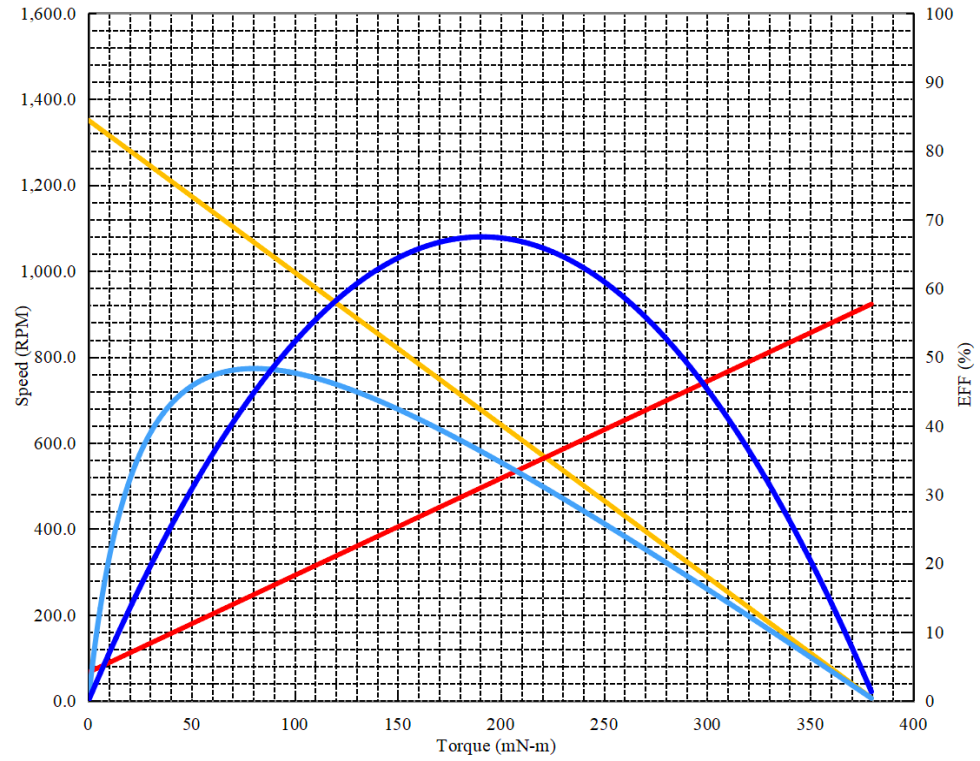
| Ροδακινό μοτόρας με καμπύ χάσμα παράδειγμα καμπύς μοτόρας μείωσης | |||||||||||||||||||||
| Έργο όνομα εγχειρήματος : | Κινητήρας DC Gear | Χουρμάς ημερομηνία : | 2025/3/26 | Απόδοση (σε περιβάλλον με θερμοκρασία 25-30 ℃) | |||||||||||||||||
| Ταχύτητα κινητήρα ταχύτητα : | 5000rpm | Πλήρης κλίμακα διαπανέλιο : | 100% | Eff | Έλεγχος μεγάλης ταχύτητας για να προλαμβάνεται η αύξηση θερμοκρασίας και η ζημιά από υπερφορτίωση. | ||||||||||||||||
| Ζυγός λανθάνουσας βαθμοί : | 1 | 20.0 | Βάτ | Σταθερή τάση σταθερή πίεση φορτίου : | 24 | Βολτ | |||||||||||||||
| Αναλογία κιβωτίου λόγος μείωσης : | 3.7 | 5.0 | Αμπέρ. | Κατεύθυνση κατεύθυνση : | CW/CCW | ||||||||||||||||
 |
Ενώ είναι χωρίς φορτίο παράμετροι Χωρίς Φορτίο | ||||||||||||||||||||
| Ταχύτητα ταχύτητα : | 1351.0 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 0.21 | Αμπερ | |||||||||||||||||||
| Μέγιστοι παράμετροι στιγμιαίως μέγιστοι στιγμιαίοι παράμετροι | |||||||||||||||||||||
| Στροφή προβολή ροπής : | 373.87 | mN-m | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 2.90 | Αμπερ | |||||||||||||||||||
| Στη μέγιστη απόδοση παράμετροι στον μέγιστο σημείο αποδοσης | |||||||||||||||||||||
| Αποτελεσματικότητα αποδοτικότητα : | 48.3 | % | |||||||||||||||||||
| Στροφή προβολή ροπής : | 80.5 | mN-m | |||||||||||||||||||
| Ταχύτητα ταχύτητα : | 1066.1 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 0.77 | Αμπερ | |||||||||||||||||||
| Έξοδος έξωθια δύναμη : | 8.98 | Βάτ | |||||||||||||||||||
| Στη μέγιστη έξωθια δύναμη παράμετροι μέγιστης έξωθιας δύναμης | |||||||||||||||||||||
| Έξοδος έξωθια δύναμη : | 13.493 | Βάτ | |||||||||||||||||||
| Στροφή προβολή ροπής : | 190.8 | mN-m | |||||||||||||||||||
| Ταχύτητα ταχύτητα : | 675.5 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 1.55 | Αμπερ | |||||||||||||||||||
| Συνδυασμός παραγωγής άλλα προσαρτήματα | |||||||||||||||||||||
| Αξεσουάρ όνομα | Φορτίο θερμοκρασία | Ψήφισμα ανάλυση | Κανάλια Αριθμός καναλιών | Παρατήρηση | |||||||||||||||||
| Μηδενικό | |||||||||||||||||||||
Ενσωματωμένος κινητήρας BLDC 4260 + πλανητικός μειωτήρας 42 mm | TJX42R4260BL
1. Πλανητικός μειωτήρας 42 mm προ-συναρμολογημένος με ασύγχρονο κινητήρα συνεχούς ρεύματος (BLDC) μεγέθους 4260
2. Ροπή εξόδου έως 20 Nm, λόγος μείωσης 60:1 (διαθέσιμοι προσαρμοστικοί λόγοι)
3. Ενσωματωμένοι αισθητήρες Hall και προαιρετικός κωδικοποιητής
4. Προστασία IP54, κατάλληλο για σκονισμένα περιβάλλοντα
Το TJX42R4260BL είναι μια ολοκληρωμένη μονάδα κίνησης που συνδυάζει έναν κινητήρα BLDC υψηλής ροπής μεγέθους 4260 και έναν πλανητικό μειωτήρα 42 mm. Η συναρμολόγηση δοκιμάζεται στο εργοστάσιο όσον αφορά την ομοκεντρικότητα και την απόδοση. Η ροπή εξόδου είναι 20 Nm σε λόγο μείωσης 60:1. Ο κινητήρας περιλαμβάνει αισθητήρες Hall για την εναλλαγή της φάσης· μπορεί να προστεθεί προαιρετικός μαγνητικός κωδικοποιητής (1024 PPR). Τάση εισόδου: 24 V ή 12 V. Οι λόγοι μείωσης μπορούν να προσαρμοστούν από 10:1 έως 200:1.
Διάμετρος 42 mm, λόγος μείωσης 60:1 (προσαρμοστικός), ροπή 8 Nm, κινητήρας BLDC με αισθητήρες Hall, προστασία IP54.
- Ηλεκτρικοί ενεργοποιητές διεύθυνσης για ηλεκτρικές ανυψωτικές μηχανές
- Κινητήριοι τροχοί βαρέων AGV
- Βάση βιομηχανικών ρομποτικών βραχιόνων
- Μεγάλα αυτόματα οδηγούμενα οχήματα
1. Πλήρης κινητήρια μονάδα: Δεν απαιτείται στοίχιση ή σύζευξη.
2. Υψηλή ροπή εξόδου: 8 Nm σε διάμετρο 42 mm.
3. Έτοιμη για ανάδραση: Hall + προαιρετικός κωδικοποιητής.








TJP96FG

TJP37FGb

TJZ37FK

TH31S

