
Γρήγοροι Σύνδεσμοι





| Κύκλος τροχιάς πλανητικού συστήματος DC διρεκτό πλανητικό μοτόρας μείωσης ταχύτητας | 7.5 Nm | 25 Watts | |||||||||||||||||||
| 3864ZY Micro brushed dc motor with planetary gearbox | Για συνδυασμό με | ||||||||||||||||||||
| Encoder & Brake | |||||||||||||||||||||
| μπορεί να συνδυαστεί με κωδικοποιητή και τροχαλιά | |||||||||||||||||||||
| TJX36RO Series | |||||||||||||||||||||
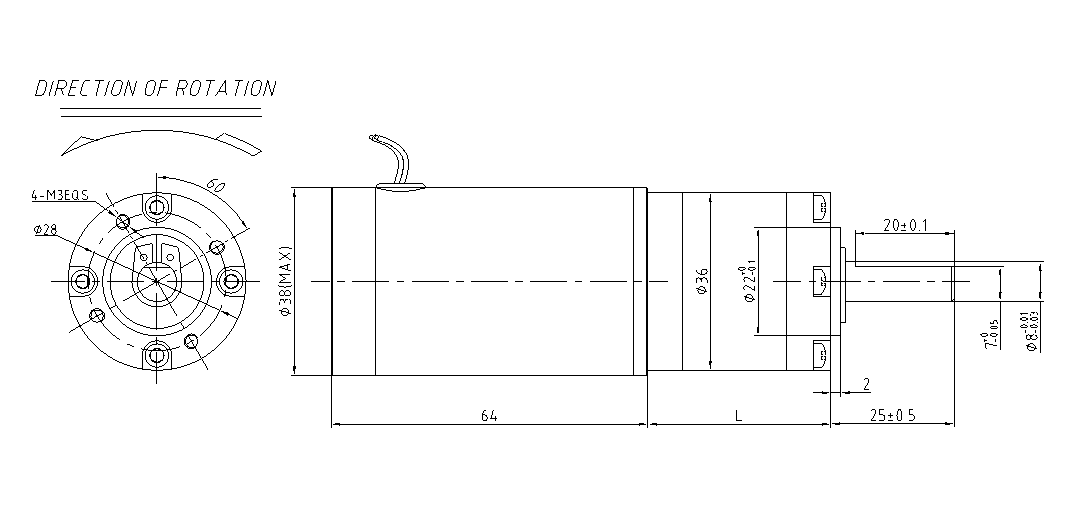
| Ζωγραφικό Σχέδιο σχέδιο εξωτερικών διαστάσεων (χιλ) | |||||||||||||||||||||
 | |||||||||||||||||||||
| Εικόνα μοτόρα φωτογραφία πραγματικού μοτέρ | |||||||||||||||||||||
 | |||||||||||||||||||||
| Χαρακτηριστικά μοτέρ ιδιότητες μοτέρ | |||||||||||||||||||||
| Υλικό στεγαστήρα υλικό εγκατάστασης | Κράμα ψευδαργύρου ζινκόχαλκη συμπεπλοκή | ||||||||||||||||||||
| Υλικό ζαχαροπλοΐου υλικό ράντα | Σίδερο & Πυθανομεταλλουργία πυθανομεταλλουργία, χάλκινα δόντια | ||||||||||||||||||||
| Αντιστροφή ροδιοειδές παράθυρο | ≤2° | ||||||||||||||||||||
| Κολοβόρα στον άξονα εξόδου κολοβόρα άξονα εξόδου | Κυλινδρικά Αντίφραση σφαιρική κολοβόρα | ||||||||||||||||||||
| Προτεινόμενη μέγιστη ταχύτητα εισόδου προτεινόμενη μέγιστη ταχύτητα εισόδου | ≤8000ΣΤ/ΛΕ | ||||||||||||||||||||
| Ακτινοβαθμός Δύναμης ραδιακή δύναμη | ≤8kgf | ||||||||||||||||||||
| Αξονική δύναμη αξονική δύναμη | ≤3kgf | ||||||||||||||||||||
| Μέγιστη πίεση δύναμης στον αξόνα μέγιστη πίεση δύναμης που μπορεί να υποφέρει ο κύριος αξόνας | ≤15kgf | ||||||||||||||||||||
| Ραδιακό κενό ραδιακό κενό | ≤0,1 χλστ | ||||||||||||||||||||
| Αξονικό κενό αξονικό κενό | ≤0.4mm | ||||||||||||||||||||
| Εύρος θερμοκρασίας λειτουργίας ωθημένος όροφος θερμοκρασίας | -20℃-120℃ | ||||||||||||||||||||
| Κομμυτάτορας δομή αντιστροφής | Βουρτσισμένο | ||||||||||||||||||||
| Κατεύθυνση περιστροφής κατεύθυνση περιστροφής | CW / CCW | ||||||||||||||||||||
| Θόρυβος θόρυβος | ≤ 60dB | ||||||||||||||||||||
| Τεχνικά δεδομένα DC Motor παράμετροι άμεσου τροχαλιασμού μοτόρα | |||||||||||||||||||||
| Μετρήσεις σε 25-30 ℃ αποτιμήσεις μετρήσεων σε δωμάτιο κλιματοποίησης | |||||||||||||||||||||
|
Μοντέλο 型号 |
Διάταξη (V ) νομική Τάση |
Χωρίς Φορτίο παράμετροι Χωρίς Φορτίο |
Αξιολογημένη νομικοί Παράμετροι |
Στάλαγμα παράμετροι Στάλαγμα |
*Συμβουλές: Οι παραγωγικές φύλλα στα αριστερά είναι περιορισμένα, παρακαλώ επικοινωνήστε με το προσωπικό μας για περισσότερες πληροφορίες σχετικά με παράμετρους. συμβουλή: Οι παράμετροι του πίνακα δεδομένων αριστερά είναι περιορισμένοι, επικοινωνήστε με την υπηρεσία πελατών για περισσότερες πληροφορίες. |
||||||||||||||||
|
Ταχύτητα ταχύτητα |
Τρέχουσα ρεύμα |
Ταχύτητα ταχύτητα |
Τρέχουσα ρεύμα |
Στροφή ροπή |
Έξοδος έξισος ενέργειας |
Eff αποδοτικότητα |
Στροφή ροπή |
Τρέχουσα ρεύμα |
|||||||||||||
| σ.α.λ. | μαμά | σ.α.λ. | Α | mN.m | W | % | mN.m | Α | |||||||||||||
| 3864ZY | 12 | 5000 | 300 | 4000 | 0.99 | 19.70 | 8.25 | 69.34 | 59.10 | 6.50 | |||||||||||
| 3864ZY | 24 | 6000 | 180 | 4800 | 0.65 | 20.30 | 10.20 | 65.74 | 60.90 | 4.52 | |||||||||||
| Τεχνικά δεδομένα μοτόρα με γεαρμό παράμετροι μοτόρα με γεαρμό | |||||||||||||||||||||
| Δεδομένα γεαρμού παράμετροι γεαρμού | |||||||||||||||||||||
|
Αναλογία κιβωτίου λόγος μείωσης n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Αριθμός σταδίων τροχαλιών βαθμοί μειώσεως |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Μήκος κιβωτίου τροχαλιών μήκος κιβωτίου τροχαλιών (χιλ) |
28.2 | 28.2 | 37 | 37 | 37 | 45.8 | 45.8 | 45.8 | 45.8 | 54.7 | 54.7 | 54.7 | 54.7 | 54.7 | 64 | 64 | 64 | 64 | 64 | ||
|
Αποτελεσματικότητα αποδοτικότητα (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 3864ZY-12V-5000R | |||||||||||||||||||||
|
Ταχύτητα χωρίς φορτίο ταχύτητα χωρίς φορτίο (rpm) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Ονομαστική Ταχύτητα νομιμή ταχύτητα (rpm) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Ονομαστική ροπή νομιμή ροπή (Ν.μ) |
0.062 | 0.087 | 0.195 | 0.273 | 0.383 | 0.617 | 0.859 | 1.210 | 1.682 | 1.944 | 2.715 | 3.795 | 5.265 | 7.414 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
Ονομαστική ροπή νομιμή ροπή (KG.CM) |
0.61 | 0.85 | 1.91 | 2.68 | 3.75 | 6.05 | 8.42 | 11.86 | 16.48 | 19.05 | 26.61 | 37.19 | 51.60 | 72.66 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
Ονομαστική ροπή νομιμή ροπή (LB.IN) |
0.70 | 0.98 | 2.20 | 3.09 | 4.32 | 6.97 | 9.70 | 13.66 | 18.99 | 21.94 | 30.65 | 42.84 | 59.45 | 83.71 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
| 3864ZY-24V-6000R | |||||||||||||||||||||
|
Ταχύτητα χωρίς φορτίο ταχύτητα χωρίς φορτίο (rpm) |
1621.6 | 1153.8 | 438.0 | 312.5 | 223.0 | 117.6 | 84.5 | 60.0 | 43.2 | 31.7 | 22.7 | 16.3 | 11.7 | 8.3 | 6.1 | 4.4 | 3.1 | 2.2 | 1.6 | ||
|
Ονομαστική Ταχύτητα νομιμή ταχύτητα (rpm) |
1297.3 | 923.1 | 350.4 | 250.0 | 178.4 | 94.1 | 67.6 | 48.0 | 34.5 | 25.4 | 18.2 | 13.0 | 9.4 | 6.7 | 4.9 | 3.5 | 2.5 | 1.8 | 1.3 | ||
|
Ονομαστική ροπή νομιμή ροπή (Ν.μ) |
0.064 | 0.090 | 0.201 | 0.282 | 0.395 | 0.636 | 0.885 | 1.247 | 1.733 | 2.003 | 2.798 | 3.910 | 5.426 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | 7.500 | ||
|
Ονομαστική ροπή νομιμή ροπή (KG.CM) |
0.63 | 0.88 | 1.97 | 2.76 | 3.87 | 6.23 | 8.67 | 12.22 | 16.98 | 19.63 | 27.42 | 38.32 | 53.17 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | 73.50 | ||
|
Ονομαστική ροπή νομιμή ροπή (LB.IN) |
0.72 | 1.01 | 2.27 | 3.18 | 4.45 | 7.18 | 9.99 | 14.08 | 19.57 | 22.61 | 31.59 | 44.15 | 61.26 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | 84.68 | ||
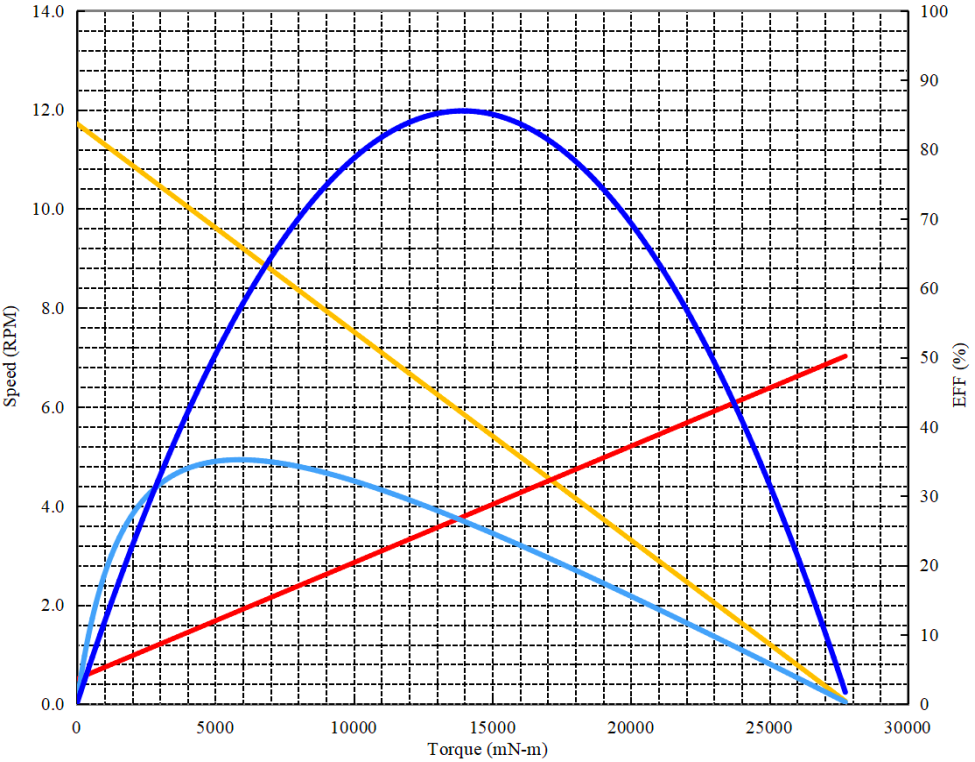
| Ροδακινό μοτόρας με καμπύ χάσμα παράδειγμα καμπύς μοτόρας μείωσης | |||||||||||||||||||||
| Έργο όνομα εγχειρήματος : | Κινητήρας DC Gear | Χουρμάς ημερομηνία : | 2025/3/26 | Απόδοση (σε περιβάλλον με θερμοκρασία 25-30 ℃) | |||||||||||||||||
| Ταχύτητα κινητήρα ταχύτητα : | 6000 στροφές ανά λεπτό | Πλήρης κλίμακα διαπανέλιο : | 100% | Eff | Έλεγχος μεγάλης ταχύτητας για να προλαμβάνεται η αύξηση θερμοκρασίας και η ζημιά από υπερφορτίωση. | ||||||||||||||||
| Ζυγός λανθάνουσας βαθμοί : | 4 | 10.0 | Βάτ | Σταθερή τάση σταθερή πίεση φορτίου : | 24 | Βολτ | |||||||||||||||
| Αναλογία κιβωτίου λόγος μείωσης : | 512 | 5.0 | Αμπέρ. | Κατεύθυνση κατεύθυνση : | CW/CCW | ||||||||||||||||
 |
Ενώ είναι χωρίς φορτίο παράμετροι Χωρίς Φορτίο | ||||||||||||||||||||
| Ταχύτητα ταχύτητα : | 11.7 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 0.18 | Αμπερ | |||||||||||||||||||
| Μέγιστοι παράμετροι στιγμιαίως μέγιστοι στιγμιαίοι παράμετροι | |||||||||||||||||||||
| Στροφή προβολή ροπής : | 27342.22 | mN-m | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 2.52 | Αμπερ | |||||||||||||||||||
| Στη μέγιστη απόδοση παράμετροι στον μέγιστο σημείο αποδοσης | |||||||||||||||||||||
| Αποτελεσματικότητα αποδοτικότητα : | 35.2 | % | |||||||||||||||||||
| Στροφή προβολή ροπής : | 5879.7 | mN-m | |||||||||||||||||||
| Ταχύτητα ταχύτητα : | 9.2 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 0.67 | Αμπερ | |||||||||||||||||||
| Έξοδος έξωθια δύναμη : | 5.69 | Βάτ | |||||||||||||||||||
| Στη μέγιστη έξωθια δύναμη παράμετροι μέγιστης έξωθιας δύναμης | |||||||||||||||||||||
| Έξοδος έξωθια δύναμη : | 8.554 | Βάτ | |||||||||||||||||||
| Στροφή προβολή ροπής : | 13939.9 | mN-m | |||||||||||||||||||
| Ταχύτητα ταχύτητα : | 5.9 | Σ.α.λ. | |||||||||||||||||||
| Τρέχουσα ρεύμα : | 1.35 | Αμπερ | |||||||||||||||||||
| Συνδυασμός παραγωγής άλλα προσαρτήματα | |||||||||||||||||||||
| Αξεσουάρ όνομα | Φορτίο θερμοκρασία | Ψήφισμα ανάλυση | Κανάλια Αριθμός καναλιών | Παρατήρηση | |||||||||||||||||
| Μαγνητικός Κωδικοποιητής μαγνητικός κωδικοποιητής | 5V-24V | 13ppr | A&B | ||||||||||||||||||
| φ37-Brake τροχαλιά | 12v-24v | / | / | ||||||||||||||||||
| Οπτικός κωδικοποιητής φωτεινός κωδικοποιητής | 5V-24V | 100ppr, 200ppr, 256ppr, 360ppr, 400ppr, 512ppr, 1000ppr | A&B | ||||||||||||||||||
Ορθογώνιο Πλανητικό Μειωτήρας 36 mm | TJX36RO | Έξοδος 90°
1. Ορθογώνιος πλανητικός μειωτήρας 36 mm, επίθεμα RO
2. Ροπή εξόδου έως 35 Nm, λόγοι μείωσης 10–200:1
3. Είσοδος με υποειδές (hypoid) ή κωνικά οδοντωτά τροχαλία + τελικό πλανητικό στάδιο
4. Πολύ μικρό ύψος για εγκατάσταση σε γωνίες
Ο TJX36RO είναι ένας ορθογώνιος πλανητικός μειωτήρας με εισαγωγική διεπαφή 36 mm. Το στάδιο εισόδου χρησιμοποιεί σύνολο υποειδών οδοντωτών τροχαλιών για υψηλότερη απόδοση και χαμηλότερο θόρυβο σε σύγκριση με τα παραδοσιακά κωνικά οδοντωτά τροχαλία. Η ροπή εξόδου φτάνει τα 35 Nm. Οι λόγοι μείωσης κυμαίνονται από 10:1 έως 200:1. Η χαλαρότητα (backlash) είναι <1,5°. Η έξοδος είναι συγκεντρική, αλλά περιστρέφεται κατά 90° σε σχέση με την είσοδο. Ιδανικός για ρομποτικές αρθρώσεις και εγκαταστάσεις με περιορισμένο χώρο.
Διάμετρος 36 mm, ορθογώνιος, ροπή 35 Nm, λόγοι μείωσης 10–200:1, απόδοση 85%.
- Αρθρώσεις αγκώνων ρομπότ
- Ρυθμιστές καθισμάτων αυτοκινήτου
- Συστήματα διεύθυνσης ναυτικών οχημάτων
- Μηχανισμοί κλίσης φωτοβολταϊκών πλαισίων
1. Συμπαγής σχεδιασμός ορθής γωνίας: Εξοικονομεί γραμμικό χώρο.
2. Εισαγωγή υποειδικού τύπου: Πιο ομαλή και ήσυχη από την κωνική.
3. Υψηλή ροπή: Έξοδος 35 Nm.








TJX22RC

TJX42RT

TJP103FGb

TJP37FGb

