
Schnelllinks




| DC-Planetengetriebemotor gleichstrom-Planetenreduktionsmotor | 25 Nm | 150 Watt | |||||||||||||||||||
| 6095ZY Micro gebürsteter Gleichstrommotor mit Planetengetriebe | Für Kombination mit | ||||||||||||||||||||
| Encoder & Bremse | |||||||||||||||||||||
| kann mit Encoder und Bremse kombiniert werden | |||||||||||||||||||||
| TJX55RZ Serie | |||||||||||||||||||||
| Abmessungszeichnung außenmaßzeichnung (mm) | |||||||||||||||||||||
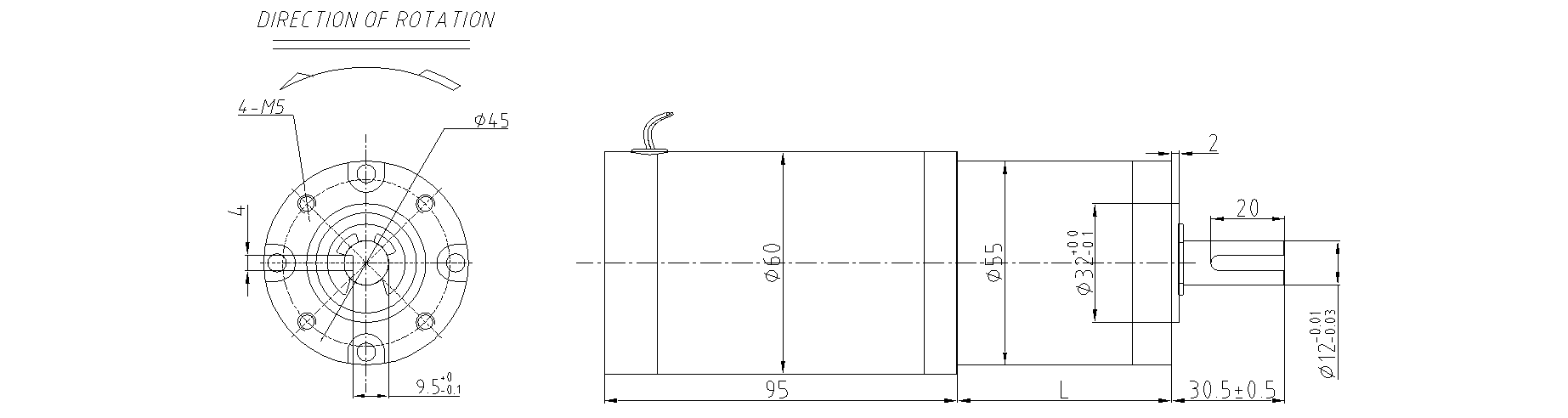 | |||||||||||||||||||||
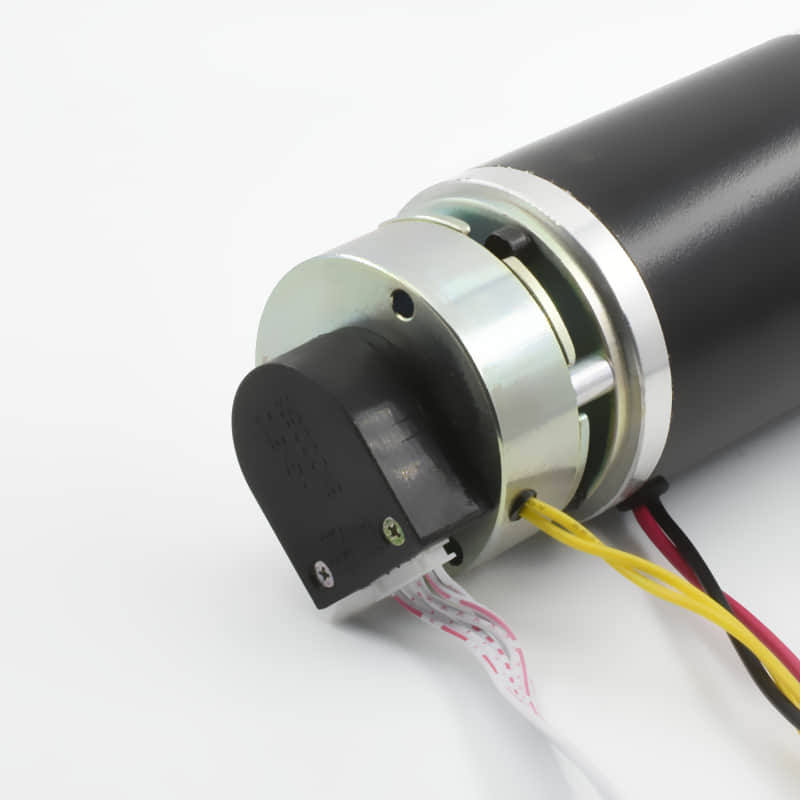
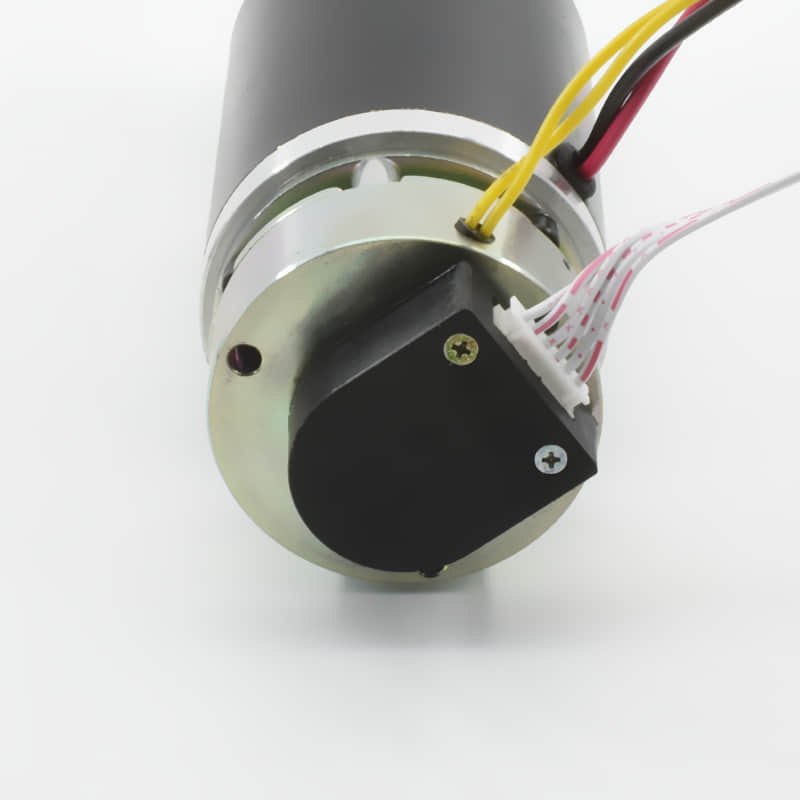
| Motorbild fotografie des Motors | |||||||||||||||||||||
 | |||||||||||||||||||||
| Motorcharakteristiken motorcharakteristiken | |||||||||||||||||||||
| Gehäusematerial material der Montagefläche | Zinklegierung zinklegierung | ||||||||||||||||||||
| Material der Zahnradschnur zahradernmaterial | Stahl stahl | ||||||||||||||||||||
| Rücklaufspiel spiel im Getriebe | ≤2° | ||||||||||||||||||||
| Lagerungen an der Ausgangswelle ausgangswellenlager | Kugellager kugellager | ||||||||||||||||||||
| Empfohlene maximale Eingangsgeschwindigkeit empfohlene maximale Eingangsdrehzahl | ≤8000U/min | ||||||||||||||||||||
| Radiale Kraft radialkraft | ≤25kgf | ||||||||||||||||||||
| Axiale Kraft axialkraft | ≤10kgf | ||||||||||||||||||||
| Maximale Druckkraft auf die Welle maximale eingedrückte Kraft der Hauptwelle | ≤50kgf | ||||||||||||||||||||
| Radiales Spiel radiales Spiel | ≤0,1 mm | ||||||||||||||||||||
| Axiales Spiel axiales Spiel | ≤0.4mm | ||||||||||||||||||||
| Betriebstemperaturbereich temperaturbereich für die Verwendung | -20℃-120℃ | ||||||||||||||||||||
| Kommutator schaltstruktur | Gebürstet | ||||||||||||||||||||
| Drehrichtung drehrichtung | CW \ CCW | ||||||||||||||||||||
| Geräuschentwicklung geräusch | ≤70dB | ||||||||||||||||||||
| Technische Daten des Gleichstrommotors parameter des Gleichstrommotors | |||||||||||||||||||||
| Werte bei 25-30 ℃ messwerte bei Zimmertemperatur | |||||||||||||||||||||
|
Modell modell |
Nennspannung (V ) nennspannung |
Leerlauf leerlaufparameter |
Nennwert nennparameter |
Stillstand blockierparameter |
*Tipps: Die Datenblätter auf der linken Seite sind begrenzt, bitte wenden Sie sich an unser Personal für weitere Parameterinformationen. hinweis: Die Parameter der Datentabelle links sind begrenzt, bitte kontaktieren Sie unseren Kundenservice für weitere Parameterinformationen. |
||||||||||||||||
|
Geschwindigkeit drehzahl |
Aktuell strom |
Geschwindigkeit drehzahl |
Aktuell strom |
Drehmoment drehmoment |
Ausgang ausgangsleistung |
Eff wirkungsgrad |
Drehmoment drehmoment |
Aktuell strom |
|||||||||||||
| u/min | mA | u/min | Ein | mN·m | W | % | mN·m | Ein | |||||||||||||
| 6095ZY | 24 | 5000 | 680 | 4000 | 4.33 | 165.20 | 69.19 | 66.59 | 495.60 | 19.86 | |||||||||||
| 6095ZY | 24 | 6000 | 850 | 4800 | 5.00 | 166.65 | 83.76 | 69.77 | 499.95 | 22.37 | |||||||||||
| Technische Daten des Motors mit Getriebe parameter des Reduktormotors | |||||||||||||||||||||
| Getriebedaten reduktorgebäude-Parameter | |||||||||||||||||||||
|
Übertragungsverhältnis übertragungsverhältnis n : 1 |
3.7 | 5.2 | 13.7 | 19.2 | 26.9 | 51 | 71 | 100 | 139 | 189 | 264 | 369 | 512 | 721 | 977 | 1367 | 1911 | 2672 | 3639 | ||
|
Anzahl der Gangstufen anzahl der Reduktionsstufen |
1 | 1 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | ||
|
Getriebe-Länge länge des Getriebes (mm) |
30.8 | 30.8 | 44 | 44 | 44 | 57.5 | 57.5 | 57.5 | 57.5 | 72.5 | 72.5 | 72.5 | 72.5 | 72.5 | 87.5 | 87.5 | 87.5 | 87.5 | 87.5 | ||
|
Effizienz wirkungsgrad (%) |
0.85 | 0.85 | 0.72 | 0.72 | 0.72 | 0.61 | 0.61 | 0.61 | 0.61 | 0.52 | 0.52 | 0.52 | 0.52 | 0.52 | 0.44 | 0.44 | 0.44 | 0.44 | 0.44 | ||
| 6095ZY-24V-5000R | |||||||||||||||||||||
|
Leerlaufdrehzahl drehzahl ohne Last (U/min) |
1351.4 | 961.5 | 365.0 | 260.4 | 185.9 | 98.0 | 70.4 | 50.0 | 36.0 | 26.5 | 18.9 | 13.6 | 9.8 | 6.9 | 5.1 | 3.7 | 2.6 | 1.9 | 1.4 | ||
|
Nennspeed nenn-Drehzahl (U/min) |
1081.1 | 769.2 | 292.0 | 208.3 | 148.7 | 78.4 | 56.3 | 40.0 | 28.8 | 21.2 | 15.2 | 10.8 | 7.8 | 5.5 | 4.1 | 2.9 | 2.1 | 1.5 | 1.1 | ||
|
Nennmoment nenn-Drehmoment (N·m) |
0.520 | 0.730 | 1.635 | 2.292 | 3.211 | 5.174 | 7.203 | 10.145 | 14.102 | 16.298 | 22.766 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | ||
|
Nennmoment nenn-Drehmoment (KG.CM) |
5.09 | 7.16 | 16.02 | 22.46 | 31.46 | 50.71 | 70.59 | 99.42 | 138.20 | 159.73 | 223.11 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | ||
|
Nennmoment nenn-Drehmoment (LB.IN) |
5.87 | 8.24 | 18.46 | 25.87 | 36.25 | 58.42 | 81.33 | 114.55 | 159.22 | 184.02 | 257.05 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | ||
| 6095ZY-24V-6000R | |||||||||||||||||||||
|
Leerlaufdrehzahl drehzahl ohne Last (U/min) |
1621.6 | 1153.8 | 438.0 | 312.5 | 223.0 | 117.6 | 84.5 | 60.0 | 43.2 | 31.7 | 22.7 | 16.3 | 11.7 | 8.3 | 6.1 | 4.4 | 3.1 | 2.2 | 1.6 | ||
|
Nennspeed nenn-Drehzahl (U/min) |
1297.3 | 923.1 | 350.4 | 250.0 | 178.4 | 94.1 | 67.6 | 48.0 | 34.5 | 25.4 | 18.2 | 13.0 | 9.4 | 6.7 | 4.9 | 3.5 | 2.5 | 1.8 | 1.3 | ||
|
Nennmoment nenn-Drehmoment (N·m) |
0.524 | 0.737 | 1.650 | 2.312 | 3.239 | 5.220 | 7.266 | 10.234 | 14.226 | 16.442 | 22.966 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | 25.000 | ||
|
Nennmoment nenn-Drehmoment (KG.CM) |
5.14 | 7.22 | 16.17 | 22.66 | 31.74 | 51.15 | 71.21 | 100.30 | 139.41 | 161.13 | 225.07 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | 245.00 | ||
|
Nennmoment nenn-Drehmoment (LB.IN) |
5.92 | 8.32 | 18.62 | 26.10 | 36.57 | 58.93 | 82.04 | 115.55 | 160.62 | 185.64 | 259.30 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | 282.27 | ||
| Getriebe-Motor-Kurvendisplay geschwindigkeitskurve des Reduktormotors | |||||||||||||||||||||
| Projekt projektname : | Gleichstrom-Getriebemotor | Dattel datum : | 2025/3/26 | Leistung (bei einer Umgebungstemperatur von 25-30 ℃) | |||||||||||||||||
| Motordrehzahl drehzahl : | 6000U/min | Vollskala messbereich : | 100% | Eff | Schnell testen, um eine Temperaturerhöhung und Schäden durch Überlastung zu verhindern. | ||||||||||||||||
| Getriebekette stufe : | 4 | 100.0 | Watt | Konstante Spannung konstante Belastung : | 24 | Volt | |||||||||||||||
| Übertragungsverhältnis übertragungsverhältnis : | 264 | 50.0 | Amp. | Richtung richtung : | Uhrzeigersinn/Gegen den Uhrzeigersinn | ||||||||||||||||
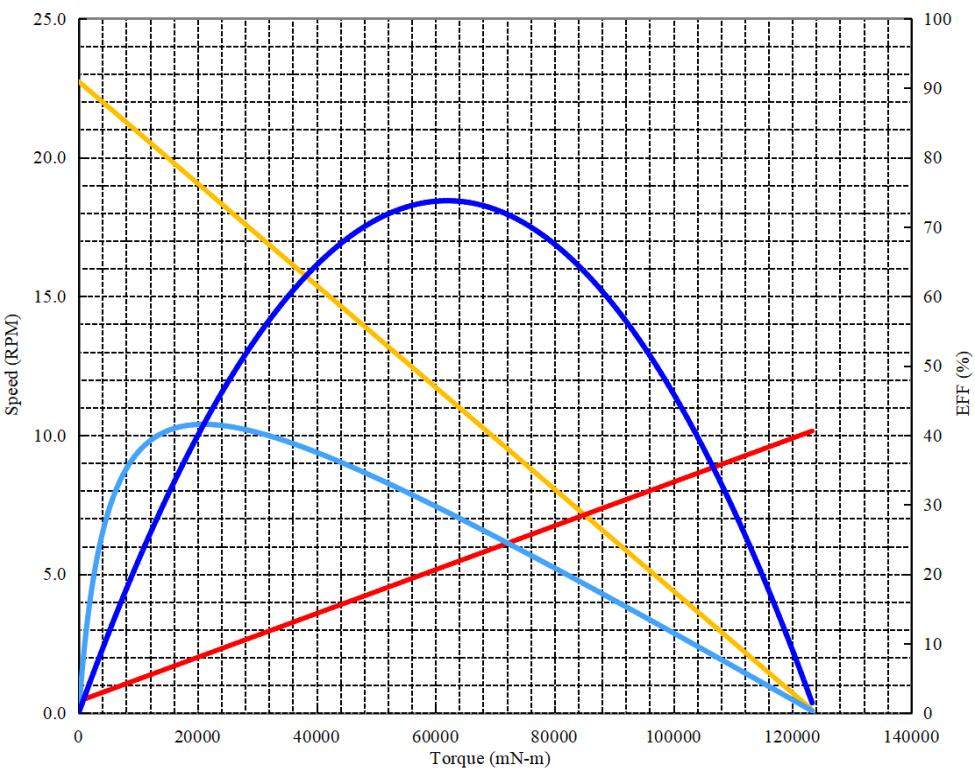 |
Bei Leerlauf leerlaufparameter | ||||||||||||||||||||
| Geschwindigkeit drehzahl : | 22.7 | U/min | |||||||||||||||||||
| Aktuell strom : | 0.85 | Ampere | |||||||||||||||||||
| Maximale momentane Parameter maximalmomentane Parameter | |||||||||||||||||||||
| Drehmoment drehmoment : | 122177.58 | mN-m | |||||||||||||||||||
| Aktuell strom : | 20.40 | Ampere | |||||||||||||||||||
| Bei maximaler Effizienz parameter des Punkts mit höchster Effizienz | |||||||||||||||||||||
| Effizienz wirkungsgrad : | 41.6 | % | |||||||||||||||||||
| Drehmoment drehmoment : | 21012.2 | mN-m | |||||||||||||||||||
| Geschwindigkeit drehzahl : | 18.9 | U/min | |||||||||||||||||||
| Aktuell strom : | 4.16 | Ampere | |||||||||||||||||||
| Ausgang ausgangsleistung : | 41.53 | Watt | |||||||||||||||||||
| Bei maximaler Leistungsausgabe parameter der maximalen Leistungsabgabe | |||||||||||||||||||||
| Ausgang ausgangsleistung : | 73.754 | Watt | |||||||||||||||||||
| Drehmoment drehmoment : | 61975.3 | mN-m | |||||||||||||||||||
| Geschwindigkeit drehzahl : | 11.4 | U/min | |||||||||||||||||||
| Aktuell strom : | 10.63 | Ampere | |||||||||||||||||||
| Produktionskombination andere Zubehörteile | |||||||||||||||||||||
| Zubehör name | Spannung spannung | Auflösung auflösung | Kanäle Anzahl | Anmerkung | |||||||||||||||||
| Magnetischer Encoder magnetischer Encoder | 5V-24V | 13ppr | A&B | ||||||||||||||||||
| φ55-Bremse bremse | 12V bis 24V | / | / | ||||||||||||||||||
| Optischer Encoder optischer Encoder | 5V-24V | 100ppr, 200ppr, 256ppr, 360ppr, 400ppr, 512ppr, 1000ppr | A&B | ||||||||||||||||||
Planetengetriebe mit Null-Spiel, 55 mm | TJX55RZ | Vorspannung für <0,2° Spiel
1. 55-mm-Planetengetriebe, Suffix RZ mit vorgespanntem Doppelplaneten-Design
2. Spiel ≤0,2°, Ausgangsdrehmoment bis zu 20 Nm
3. Federbelastete geteilte Planetenräder zur Eliminierung von Spiel
4. Ideal für hochpräzise Indexierungen und Robotik
Das TJX55RZ erreicht nahezu null Spiel (≤0,2°) mittels eines patentierten Vorspannmechanismus mit geteilten Planetenrädern. Zwei Planetenräder werden federbelastet gegeneinander gedrückt, um das Zahnradspiel zu eliminieren, ohne die Reibung signifikant zu erhöhen. Das Ausgangsdrehmoment beträgt 20 Nm (herabgestuft, um die Präzision zu gewährleisten). Übersetzungsverhältnisse von 5:1 bis 100:1. Das Spiel bleibt über die gesamte Lebensdauer des Getriebes konstant. Geeignet für präzise Drehtische und High-End-Robotik.
Durchmesser 55 mm, Spiel <0,2°, Drehmoment 20 Nm, Übersetzungsverhältnisse 5–100:1.
- Präzisions-Drehtische
- Teleskop-Positioniersysteme
- Prüfstände für Luft- und Raumfahrt-Aktuatoren
- Hochwertige chirurgische Roboter
1. Nahezu spielfreie Übertragung: <0,2° für höchste Präzision.
2. Vorspannmechanismus: Gewährleistet langfristige Genauigkeit.
3. Hoher Drehmomentwert: 200 Nm trotz spielfreier Konstruktion.








Die Anlage ist in der Lage, die Anlage zu verarbeiten.

TJZ42FG

TJZ42FO

TJZ60FT

